
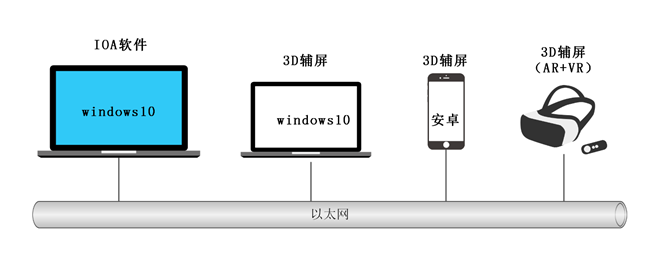
IOA支持多個終端AR及VR混合多人互動同屏仿真,通過一主多從模式能夠實現多人同場景應用及體驗,點擊獲得下載鏈接
[點擊下載IOA軟件](http://www.ioaol.com/down)
其中IOA軟件的PC端安裝環境要求為windows10,其硬件配置要求如下所述:
>* CPU:Intel平臺,≥i5九代及其以上配置;
>* 顯卡:獨立顯卡,≥4G;
>* 內存:≥4G內存,(備注:做機器人KEBA虛擬示教編程要求內存≥8G);
>* 顯示器:分辨率要求為1920×1080(備注:建議采用雙屏,一屏作為3D仿真,一屏幕作為編程);
*****
對于通過虛擬控制器編程進行模擬仿真,由于各個控制器及編程仿真的環境不同,對電腦內存要求不同,其內存要求列表如下
| 模擬器| 內存要求 |
| --- | --- |
| 西門子S7-1214——博圖PLCSIM | ≥4G |
| 西門子S7-1512——博圖PLCSIM | ≥4G |
| 正運動ZMC308——ZDevelop | ≥4G |
| KEBA工業機器人——Kemotion | ≥8G |
| Python | ≥4G |
| LabVIEW | ≥4G |
*****
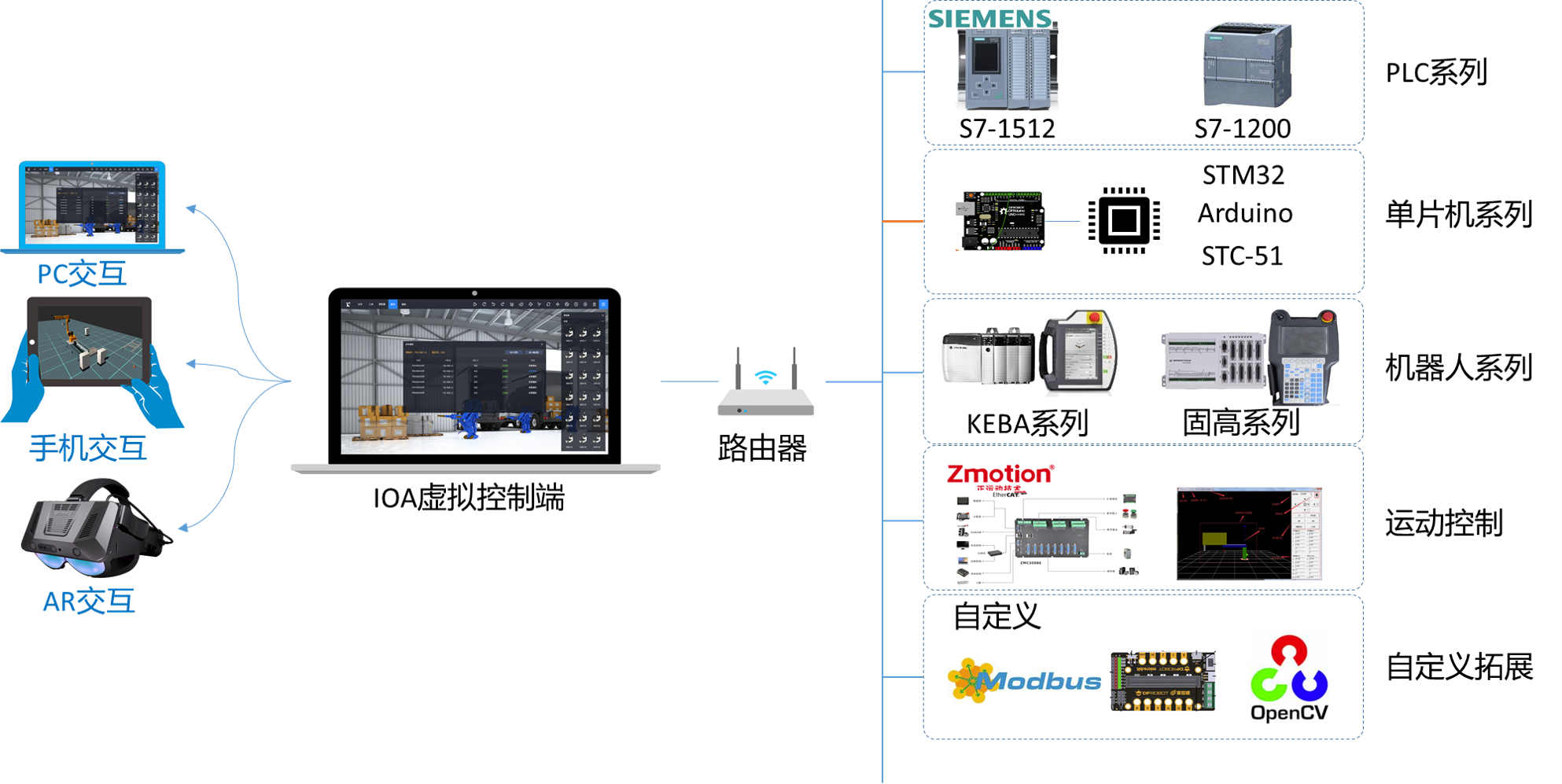
IOA兼容多種控制器的虛實仿真與編程,同時也支持虛擬控制的編程與應用,安裝IOA的控制軟件之后你需要安裝對應的仿真控制器編程環境進行虛實仿真,IOA-V4.0的支持仿真軟件如下:
| 控制器| 仿真模式| 編程工具下載|官網鏈接|用途|
|---|---|---|---|---|
| 西門子S7-1214 | 真實+虛擬 | 博圖V15 | [西門子官網](http://www.ad.siemens.com.cn/service/answer/solved_158646_1028.html) | 邏輯控制|
| 西門子S7-1512 | 真實+虛擬 | 博圖V15 | [西門子官網](http://www.ad.siemens.com.cn/service/answer/solved_158646_1028.html) | 邏輯控制|
| ZMC308 | 真實+虛擬 | ZDevelop | [正運動官網](http://www.zmotion.com.cn/) | 機器人運動控制|
| KEBA工業機器人 | 真實+虛擬 | Kemotion | KEBA官網 | 機器人示教編程|
| 固高GUC控制器 | 真實 | 無 | [arduino社區](https://www.arduino.cn/) | 機器人示教編程|
| 單片機Arduino | 真實 | mixly+IDE | [arduino ](https://www.arduino.cn/)| 邏輯控制|
| 單片機ESP32 | 真實 | mixly+IDE | [ESP ](https://www.espressif.com/zh-hans)| 物聯網控制|
| Python | 虛擬 | mixly+IDE | 無 | 邏輯控制|
~~~
- IOA簡介
- 軟件安裝及注冊
- 軟件安裝要求
- 西門子PLC仿真與安裝
- 博圖軟件及仿真軟件安裝
- 實體1200PLC接入IOA
- 虛擬1200PLC接入IOA
- 虛擬1500PLC接入IOA
- S7-1214接入IOA信號說明
- S7-1512接入IOA信號說明
- ZMC運動控制系列仿真與安裝
- ZMC308BE控制器說明
- ZMC308BE接入IOA仿真
- KEBA工業機器人軟件安裝使用及仿真
- 軟件安裝及維護
- IOA仿真與虛擬示教器
- IOA仿真與真實示教器
- 單片機控制與仿真
- arduino-uno控制器
- uno接入說明
- uno函數庫
- arduino-mega控制器
- mega接入說明
- mega函數庫
- ESP32物聯網單片機
- ESP32接入說明
- ESP32庫函數
- Python虛擬示教器控制器
- 虛擬機器人示教器
- 基礎模塊
- Mbus-S虛擬工廠模塊
- Mbus-R4模塊
- 物聯網模塊
- Python 環境搭建
- 視覺相機應用
- 圖像識別助手說明
- 視覺相機接入IOA方法
- 軟件注冊
- 軟件下載
- 軟件安裝
- 快速入門
- 快速上手視頻合集
- 軟件界面及基本操作
- IOA界面應用基礎操作
- UI界面說明
- 快捷鍵應用
- 3D導航模式
- 3D場景布局操作
- 控制器連接
- 11
- IOA模型庫概覽
- 物流傳輸模型庫說明
- 機械零件模型說明
- 機電單元模型說明
- 傳感交互模型說明
- 人機交互模型
- 傳感器模型
- 虛擬繼電模型
- 機器人模型
- 物料模型庫
- 移動機器人
- 建筑模型庫
- 5分鐘入門課程包
- 西門子PLC實訓課程資源包
- 工業機器人示教與編程
- ZMC運動控制與編程
- 嵌入式入門與仿真
- 系統集成與應用