
[TOC]
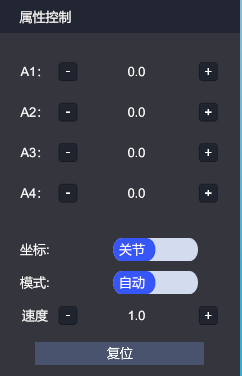
## 1、ER130-C104
模型圖片:

用途:
埃夫特4軸負載130KG碼垛機器人,進行工業搬運、碼垛
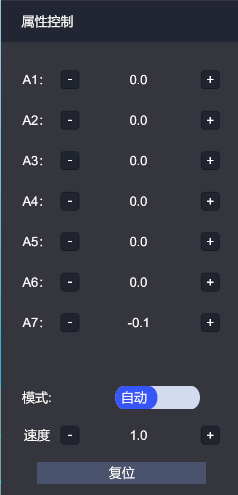
控制接口:
(1)R4伺服:KEBA_R4控制,控制機器人四軸運動
注:坐標可選擇關節坐標系與世界坐標系,模式可選自動和模擬
(2)碰撞報警:DI控制,機器人發生碰撞后高電平
(3)爪具檢測:DI控制,機器人爪具接觸到位后高電平
備注:可拼接小吸盤、矩陣吸盤、棧板吸盤
類似模型:SCARA-S6-045、SCARA-S6-060、S4_R600機械臂、S4_R1000機械臂、ER15-4-1600
*****
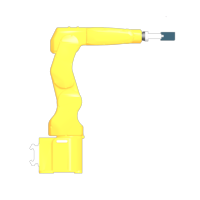
## 2、ER3-600
模型圖片:
用途:
埃夫特6軸負載3KG機器人,進行工業搬運、焊接等
控制接口:
(1)R6伺服:KEBA_R6控制,控制機器人六軸運動
注:模式可選自動和模擬
(2)碰撞報警:DI控制,機器人發生碰撞后高電平
(3)爪具檢測:DI控制,機器人爪具接觸到位后高電平
備注:可拼接小吸盤、矩陣吸盤、激光頭、點膠頭、噴涂頭、焊接頭、80爪具、160爪具、240爪具、320爪具、400爪具、480爪具
類似模型:ER20-1600、KUKA_KR1610、KUKA-KR210
*****
## 3、ER3-600+A
模型圖片:
用途:
埃夫特7軸負載3KG機器人,進行工業搬運、焊接等
控制接口:
(1)R7伺服:KEBA_R7控制,控制機器人七軸運動
注:模式可選自動和模擬
(2)碰撞報警:DI控制,機器人發生碰撞后高電平
(3)爪具檢測:DI控制,機器人爪具接觸到位后高電平
(4)導軌0點:DI控制,導軌達到最小值后高電平
(5)導軌限位:DI控制,導軌達到最大值后高電平
備注:可拼接小吸盤、矩陣吸盤、激光頭、點膠頭、噴涂頭、焊接頭、80爪具、160爪具、240爪具、320爪具、400爪具、480爪具
類似模型:ER20-1600+A
*****
## 4、800-1K-行走軸
模型圖片:
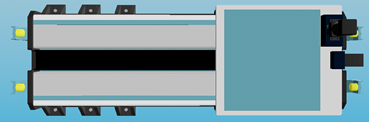
用途:
移動工業機器人,使其能在指定路線上進行運動,擴大機器人的作業半徑
參數(尺寸/功能):
長度:2、3、4、5、6、7、8、9、10,單位M
控制接口:
(1)X軸伺服:伺服控制,控制行走軸運動
(2)X-負限位:DI控制,X軸達到最小值后高電平
(3)X-0限位:DI控制,X軸達到0限位后高電平
(4)X-正限位:DI控制,X軸達到最大值后高電平
(5)X軸編碼:Float32位反饋,顯示X軸當前運動位置
備注:可拼接ER3-600、ER20-1600、KUKA-KR1610、KUKA-KR210、SCARA-S6-045、SCARA-S6-060、S4_R600機械臂、S4_R1000機械臂、ER15-4-1600、ER130-C104
類似模型:200-1K-行走軸
*****
## 5、小吸盤
模型圖片:
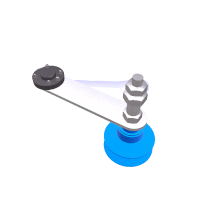
用途:
吸取物料
控制接口:
(1)吸盤使能:DO控制,高電平控制吸盤使能
(2)耗材反饋:DI反饋,檢測到物料后反饋高電平
類似模型:矩陣吸盤、棧板吸盤
*****
## 6、激光頭
模型圖片:
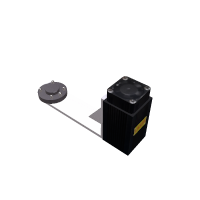
用途:
發射激光
控制接口:
(1)激光使能:DO控制,高電平控制激光使能
(2)耗材反饋:DI反饋,檢測到物料后反饋高電平
類似模型:點膠頭、噴涂頭、焊接頭
*****
## 7、80爪具
模型圖片:
用途:
夾取物料
控制接口:
(1)爪具使能:DO控制,高電平控制爪具使能
(2)耗材反饋:DI反饋,檢測到物料后反饋高電平
類似模型:160爪具、240爪具、320爪具、400爪具、480爪具
*****
- IOA簡介
- 軟件安裝及注冊
- 軟件安裝要求
- 西門子PLC仿真與安裝
- 博圖軟件及仿真軟件安裝
- 實體1200PLC接入IOA
- 虛擬1200PLC接入IOA
- 虛擬1500PLC接入IOA
- S7-1214接入IOA信號說明
- S7-1512接入IOA信號說明
- ZMC運動控制系列仿真與安裝
- ZMC308BE控制器說明
- ZMC308BE接入IOA仿真
- KEBA工業機器人軟件安裝使用及仿真
- 軟件安裝及維護
- IOA仿真與虛擬示教器
- IOA仿真與真實示教器
- 單片機控制與仿真
- arduino-uno控制器
- uno接入說明
- uno函數庫
- arduino-mega控制器
- mega接入說明
- mega函數庫
- ESP32物聯網單片機
- ESP32接入說明
- ESP32庫函數
- Python虛擬示教器控制器
- 虛擬機器人示教器
- 基礎模塊
- Mbus-S虛擬工廠模塊
- Mbus-R4模塊
- 物聯網模塊
- Python 環境搭建
- 視覺相機應用
- 圖像識別助手說明
- 視覺相機接入IOA方法
- 軟件注冊
- 軟件下載
- 軟件安裝
- 快速入門
- 快速上手視頻合集
- 軟件界面及基本操作
- IOA界面應用基礎操作
- UI界面說明
- 快捷鍵應用
- 3D導航模式
- 3D場景布局操作
- 控制器連接
- 11
- IOA模型庫概覽
- 物流傳輸模型庫說明
- 機械零件模型說明
- 機電單元模型說明
- 傳感交互模型說明
- 人機交互模型
- 傳感器模型
- 虛擬繼電模型
- 機器人模型
- 物料模型庫
- 移動機器人
- 建筑模型庫
- 5分鐘入門課程包
- 西門子PLC實訓課程資源包
- 工業機器人示教與編程
- ZMC運動控制與編程
- 嵌入式入門與仿真
- 系統集成與應用