
[TOC]
## 1、控制器概述
ZMC308BE是正運動技術開發的一款總線+脈沖混合型控制器,本身支持8軸,最多可擴展至16軸,支持直線插補、任意圓弧插補、空間圓弧、螺旋插補、電子凸輪、電子齒輪、同步跟隨、虛擬軸設置等;采用優化的網絡通訊協議可以實現實時的運動控制。
連接配置:
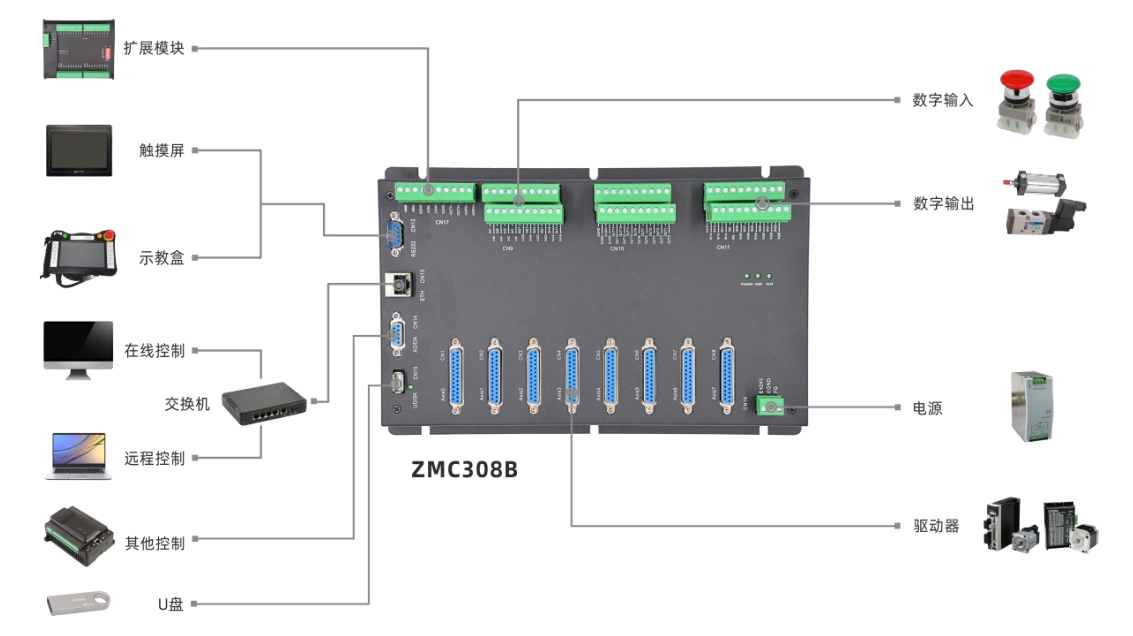
ZMC308BE運動控制器支持以太網,EtherCAT,U 盤,CAN,串口, 485,422 等通訊接口,通過 CAN 總線可以連接各個擴展模塊,從而擴展輸入輸 出點數或運動軸(CAN 總線兩端需要并接 120 歐姆的電阻) 。支持 U 盤保存或讀取數據。
***
## 2、開發軟件及應用
ZDevelop是Zmoiton系列運動控制器的PC端程序開發調試軟件,通過它用戶能夠很容易的對控制器進行配置,快速開發應用程序以及對運動控制器正在運行的程序進行實時調試。
>**ZDevelop軟件:**[鏈接](http://www.zmotion.com.cn/pro_info_68.html)
>**ZDevelop使用手冊:**[鏈接](http://www.zmotion.com.cn/upload/ZDevelop%E4%BD%BF%E7%94%A8%E6%89%8B%E5%86%8CV3.00.01.pdf)
***
ZDevelop軟件平臺:
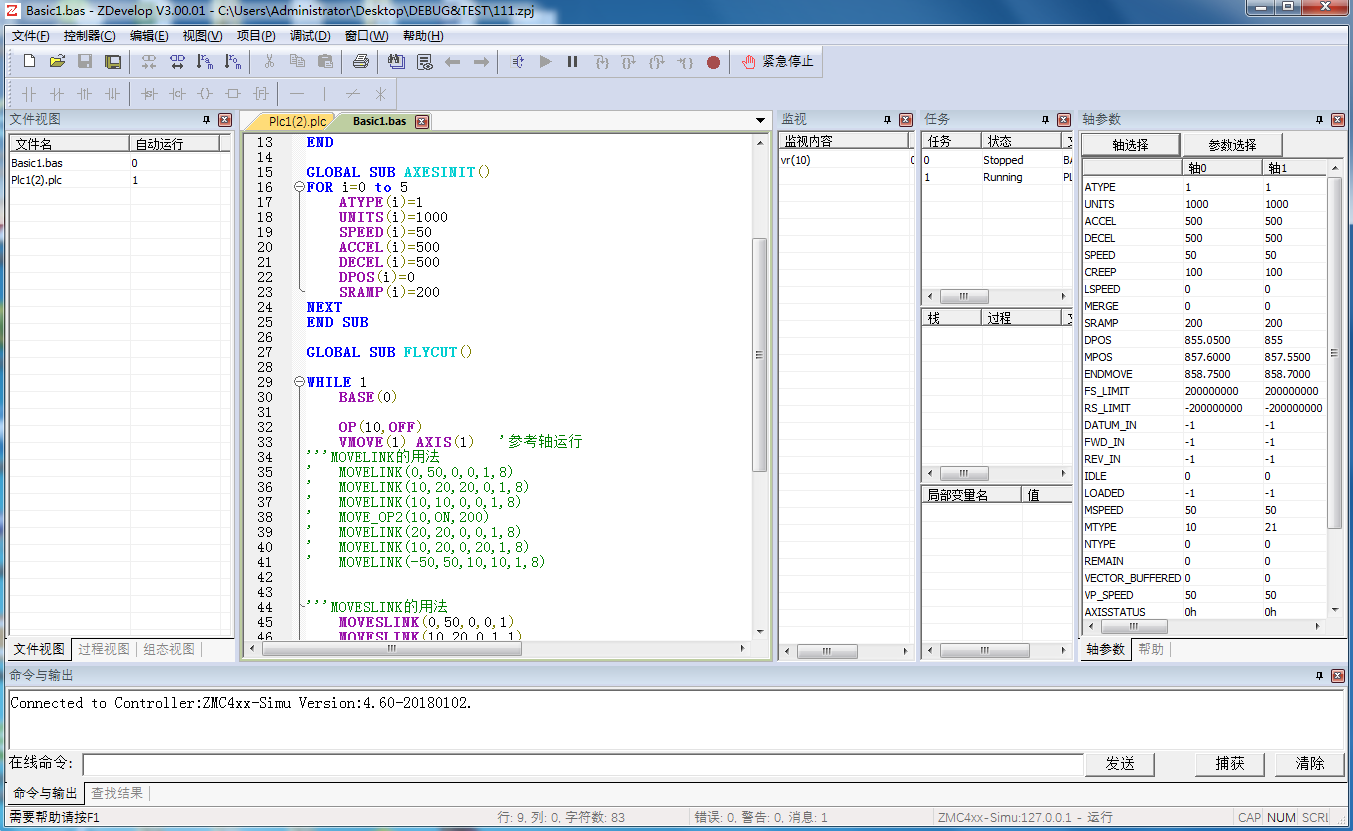
支持三種編程方式,分別為 Basic、PLC 梯形圖、HMI 組態,使用 ZDevelop 軟件編寫的程序可以下載到正運動控制器里,也可以在 PC 平臺仿真運行。ZBasic、ZPLC 和 ZHMI 之間可以多任務運行,ZBasic 可以多任務號運行,ZPLC與ZHMI均只能一個任務號運行。
***
## 3、編程及開發資料
ZDevelop支持三種編程方式,分別為 Basic、PLC 梯形圖、HMI 組態。
>①**ZMotion Basic 編程手冊:**[鏈接](http://www.zmotion.com.cn/upload/%E6%AD%A3%E8%BF%90%E5%8A%A8%E6%8A%80%E6%9C%AF-%E3%80%8AZBasic%E7%BC%96%E7%A8%8B%E6%89%8B%E5%86%8CV3.2.5%E3%80%8B.pdf)
②**ZMotion PLC 編程手冊:**[鏈接](http://www.zmotion.com.cn/upload/%E6%AD%A3%E8%BF%90%E5%8A%A8%E6%8A%80%E6%9C%AF-%E3%80%8AZMotion%20PLC%E7%BC%96%E7%A8%8B%E6%89%8B%E5%86%8CV2.0.0%E3%80%8B.pdf)
③**ZMotion Hmi 編程手冊:**[鏈接](http://www.zmotion.com.cn/upload/ZHmi%E6%89%8B%E5%86%8C.pdf)
***
- IOA簡介
- 軟件安裝及注冊
- 軟件安裝要求
- 西門子PLC仿真與安裝
- 博圖軟件及仿真軟件安裝
- 實體1200PLC接入IOA
- 虛擬1200PLC接入IOA
- 虛擬1500PLC接入IOA
- S7-1214接入IOA信號說明
- S7-1512接入IOA信號說明
- ZMC運動控制系列仿真與安裝
- ZMC308BE控制器說明
- ZMC308BE接入IOA仿真
- KEBA工業機器人軟件安裝使用及仿真
- 軟件安裝及維護
- IOA仿真與虛擬示教器
- IOA仿真與真實示教器
- 單片機控制與仿真
- arduino-uno控制器
- uno接入說明
- uno函數庫
- arduino-mega控制器
- mega接入說明
- mega函數庫
- ESP32物聯網單片機
- ESP32接入說明
- ESP32庫函數
- Python虛擬示教器控制器
- 虛擬機器人示教器
- 基礎模塊
- Mbus-S虛擬工廠模塊
- Mbus-R4模塊
- 物聯網模塊
- Python 環境搭建
- 視覺相機應用
- 圖像識別助手說明
- 視覺相機接入IOA方法
- 軟件注冊
- 軟件下載
- 軟件安裝
- 快速入門
- 快速上手視頻合集
- 軟件界面及基本操作
- IOA界面應用基礎操作
- UI界面說明
- 快捷鍵應用
- 3D導航模式
- 3D場景布局操作
- 控制器連接
- 11
- IOA模型庫概覽
- 物流傳輸模型庫說明
- 機械零件模型說明
- 機電單元模型說明
- 傳感交互模型說明
- 人機交互模型
- 傳感器模型
- 虛擬繼電模型
- 機器人模型
- 物料模型庫
- 移動機器人
- 建筑模型庫
- 5分鐘入門課程包
- 西門子PLC實訓課程資源包
- 工業機器人示教與編程
- ZMC運動控制與編程
- 嵌入式入門與仿真
- 系統集成與應用