
[TOC]
## 概述
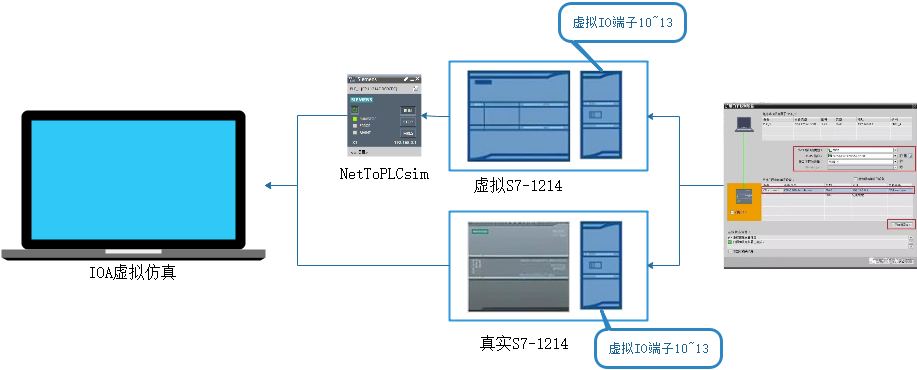
如圖所示,IOA支持虛、實兩種S7-1214PLC接入,通過虛擬S7-1214進行仿真時候需要借助NetToPLCsim以及S7-PLCSIM 軟件。
備注:
* 虛擬S7-1214以及真實的S7-1214均采用虛擬IO端子接入,即10.0至13.7共計32個輸入端口和32個輸出端口;
* 真實的S7-1214只需要主控CPU接入即可,不需要額外安裝IO擴展端子,其虛擬輸入輸出端口10.0至13.7可以直接使用。
***
## S7-1214接入信號說明
IOA軟件支持虛擬S7-1214以及真實S7-1214接入,需注意,IOA軟件中已經建立了1對1的PLC物理信號以及虛擬寄存器關系,在PLC和IOA建立連接時,PLC需使用模板工程文件。IOA S7-1214控制器與PLC的端口映射關系如下表所示:
> S7-1214模板工程文件[下載](http://www.ioaol.com/down#Four)
| PLC的端口/IO |IOA中的信號映射 |備注 |
| --- | --- |--- |
| Q10.0. ~ Q13.7 | Q10. 0~ Q13.7 | |
| I10.0 ~ I13.7 | I10.0 ~ I13.7 | |
| Axis[1](DB1000寄存器) | M1 |虛擬1214PLC不支持軸工藝仿真 |
| Axis[2](DB1000寄存器) | M2 |虛擬1214PLC不支持軸工藝仿真 |
| Axis[3](DB1000寄存器) | M3 |虛擬1214PLC不支持軸工藝仿真 |
| Axis[4](DB1000寄存器) | M4 |虛擬1214PLC不支持軸工藝仿真 |
| FLOAT[0]~FLOAT[3] | float32輸入0~3 |映射至寄存器 |
| FLOAT[4]~FLOAT[7] | float32輸出0~3 |映射至寄存器 |
> 控制器輸入輸出點映射說明
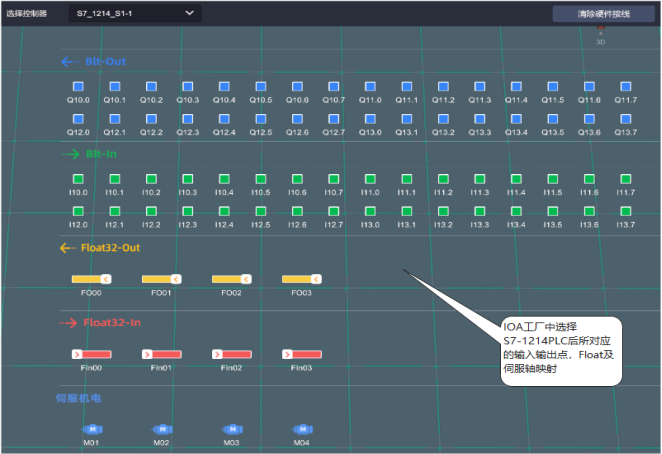
由上圖可以看出,IOA中S7-1214控制器包含32個輸入端口,32個輸出端口,分別為I10.0~I13.7,Q10.0~Q13.7。這些輸入輸出點和PLC中的I/O地址I10.0~I13.7,Q10.0~Q13.7是一一對應的(對于實體PLC不需要給模塊分配這些地址,可在編程時直接使用)。
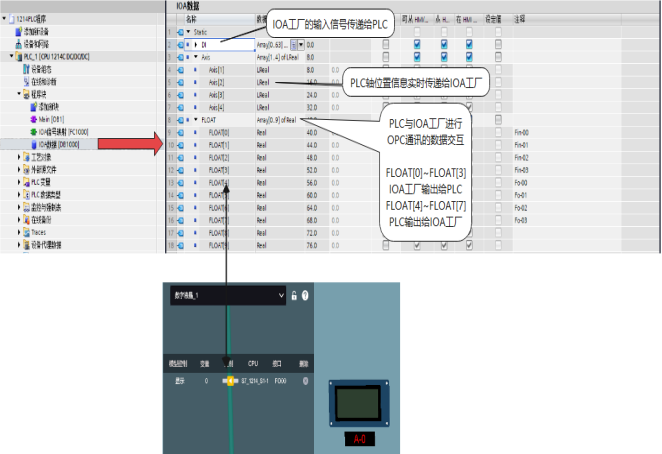
>控制器與IOA工廠數據交互對應關系
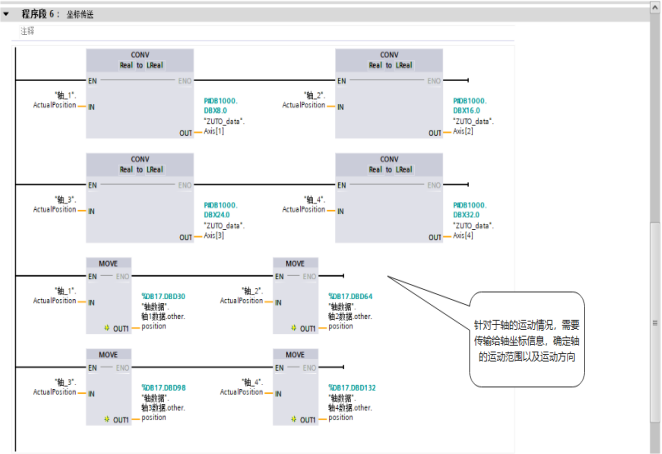
對于Float接口及伺服電機接口對應模板工程中的DB1000中的寄存器,如下圖所示
***
## S7-1214編程控制示例說明
### 基本DO控制示例
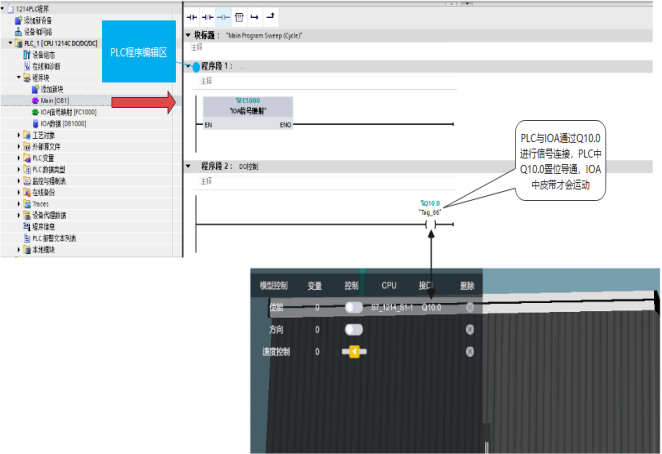
* 在IOA工廠中添加S7-1214控制器,并添加一條皮帶線,給皮帶線使能配置Q10.0輸出點
* 打開模板工程,在程序編輯區添加一個線圈輸出,配置Q10.0輸出點
* 將程序下載到PLC中。IOA S7-1214控制器連接PLC,并點擊IOA運行按鈕。
* 觀察PLC程序,當Q10.0置位時,線體使能所接Q10.0也接通了,同時線體轉動了。
***
### 基本DI控制示例
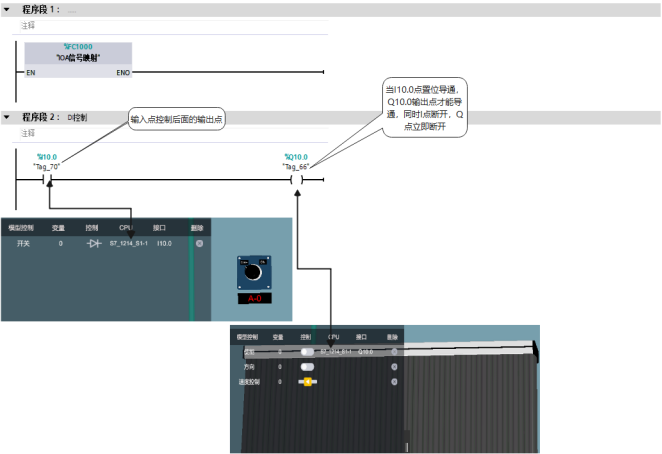
* 在IOA工廠中添加S7-1214控制器,并添加一條皮帶線和一個切換開關,給皮帶線使能配置Q10.0輸出點,切換開關配置I10.0輸入點。
* 打開模板工程,在程序編輯區添加一個常開觸點,配置I10.0輸入點, 一個線圈輸出,配置Q10.0輸出點。
* 將程序下載到PLC中。IOA S7-1214控制器連接PLC,并點擊IOA運行按鈕。
* 觀察PLC程序,打開切換開關時,I10.0得電,常開觸點接通,線體使能所接Q10.0也接通,同時線體轉動了。當關閉切換開關,I10.0失電,常開觸點斷開,線體使能所接Q10.0也斷開,線體停止轉動。
***
### 基本電機控制示例(需要實體PLC)

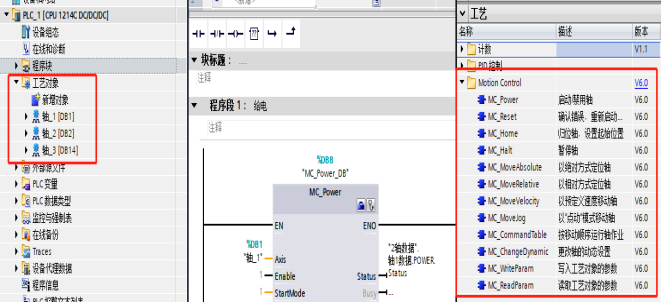
* 在IOA工廠中添加S7-1214控制器,并添加一個單軸機械手,伺服接口配置M1。
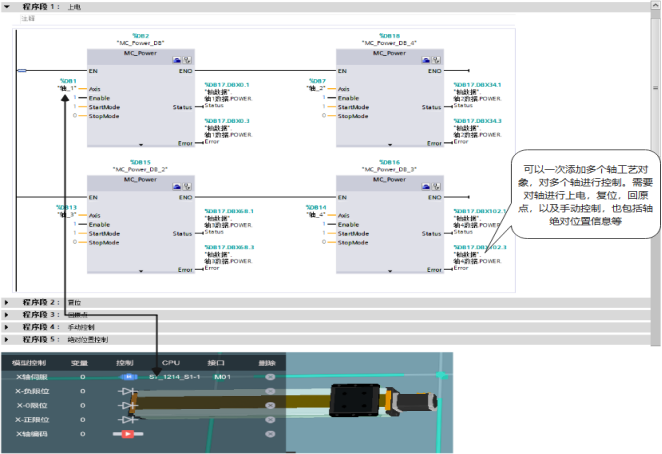
* 打開模板工程,在工藝對象中添加一個定位軸工藝對象,并添加軸控制指令。
* 添加CONVERT指令,將軸位置傳送到DB1000中的Axis[1]寄存器。
* 將程序下載到PLC中。IOA S7-1214控制器連接PLC,并點擊IOA運行按鈕。
* 監控PLC程序,通過MoveJog指令控制軸前后運動,同時觀察IOA中單軸機械手的運行狀態。
***
### 基本FLOAT數據控制示例
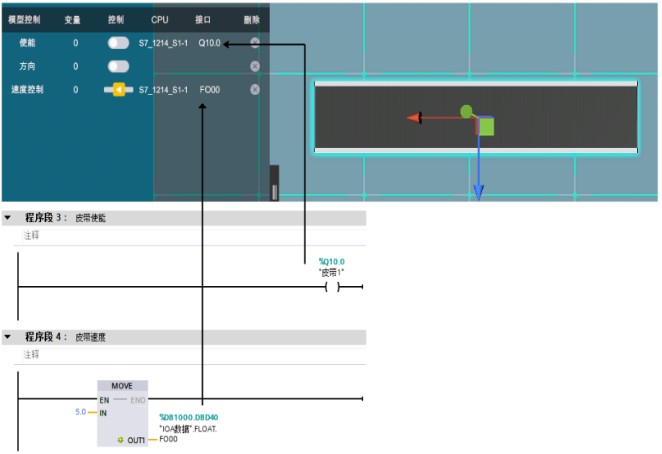
* 在IOA工廠中添加S7-1214控制器,并添加一條皮帶線,給皮帶線使能配置Q10.0輸出點,速度控制配置FO00
* 打開模板工程,在程序編輯區添加一個線圈輸出,配置Q10.0輸出點。添加Move指令,給FO00賦值控制皮帶速度。
* 將程序下載到PLC中。IOA S7-1214控制器連接PLC,并點擊IOA運行按鈕。
* 觀察PLC程序,給FO00賦值不同數值時,皮帶速度會相應發生改變。
- IOA簡介
- 軟件安裝及注冊
- 軟件安裝要求
- 西門子PLC仿真與安裝
- 博圖軟件及仿真軟件安裝
- 實體1200PLC接入IOA
- 虛擬1200PLC接入IOA
- 虛擬1500PLC接入IOA
- S7-1214接入IOA信號說明
- S7-1512接入IOA信號說明
- ZMC運動控制系列仿真與安裝
- ZMC308BE控制器說明
- ZMC308BE接入IOA仿真
- KEBA工業機器人軟件安裝使用及仿真
- 軟件安裝及維護
- IOA仿真與虛擬示教器
- IOA仿真與真實示教器
- 單片機控制與仿真
- arduino-uno控制器
- uno接入說明
- uno函數庫
- arduino-mega控制器
- mega接入說明
- mega函數庫
- ESP32物聯網單片機
- ESP32接入說明
- ESP32庫函數
- Python虛擬示教器控制器
- 虛擬機器人示教器
- 基礎模塊
- Mbus-S虛擬工廠模塊
- Mbus-R4模塊
- 物聯網模塊
- Python 環境搭建
- 視覺相機應用
- 圖像識別助手說明
- 視覺相機接入IOA方法
- 軟件注冊
- 軟件下載
- 軟件安裝
- 快速入門
- 快速上手視頻合集
- 軟件界面及基本操作
- IOA界面應用基礎操作
- UI界面說明
- 快捷鍵應用
- 3D導航模式
- 3D場景布局操作
- 控制器連接
- 11
- IOA模型庫概覽
- 物流傳輸模型庫說明
- 機械零件模型說明
- 機電單元模型說明
- 傳感交互模型說明
- 人機交互模型
- 傳感器模型
- 虛擬繼電模型
- 機器人模型
- 物料模型庫
- 移動機器人
- 建筑模型庫
- 5分鐘入門課程包
- 西門子PLC實訓課程資源包
- 工業機器人示教與編程
- ZMC運動控制與編程
- 嵌入式入門與仿真
- 系統集成與應用