
[TOC]
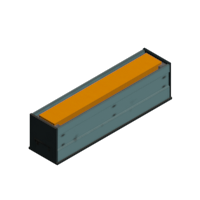
## 1、PV大皮帶
模型圖片:

用途:
用于耗材的物流運輸
參數(尺寸/功能):
(1)寬度:500,1000,1500,2000,2500,3000,單位mm
(2)長度:1000,2000,3000,4000,5000,6000,單位mm
備注:
PV大皮帶其中心點在其底部,該模型厚度為80mm
控制接口:
(1)使能:DO控制,高電平控制傳輸使能開始轉動
(2)方向:DO控制,高低電平設置轉動方向,默認正方向
(3)速度:Float32控制,0~10的模擬量控制
類似模型:PV小皮帶、PV雙皮帶、GT滾筒、PV90度轉向(100、200、300、400、500、1000)
*****
## 2、十字轉向-500
模型圖片:

參數(尺寸/功能):
用于傳輸物料和耗材的十字轉向
說明:
十字轉向傳輸帶為XY兩個方向的轉向傳輸,其下部具有頂升氣缸,當需要轉向時候通過頂升氣缸頂起進行轉向
控制接口:
(1)X使能:DO控制,X方向對傳輸帶傳輸使能,即滾筒傳輸使能
(2)X方向:DO控制,X方向對傳輸帶方向控制,即高電平為反方向
(3)X速度控制:Float32控制,0~10的模擬量控制速度
(4)Y氣缸使能:DO控制,使能后氣缸抬起,傳輸帶可Y方向運行
(5)Y使能:DO控制,Y方向對傳輸帶傳輸使能,即滾筒傳輸使能
(6)Y方向:DO控制,Y方向對傳輸帶方向控制,即高電平為反方向
(7)Y速度控制:Float32控制,0~10的模擬量控制速度
類似模型:十字轉向-300、十字轉向-1000
*****
## 3、阻擋氣缸
模型圖片:
用途:
阻擋物料
參數(尺寸/功能):
長度:500,1000,1500,2000,2500,3000,單位mm
說明:
使能打開,氣缸頂起阻擋物料,并提供阻擋反饋
控制接口:
(1)使能:DO控制,高電平控制氣缸頂起
(2)阻擋反饋:DI控制,阻擋物料后高電平
類似模型:滾動阻擋器
*****
## 4、稱重傳輸帶
模型圖片:

用途:
稱重傳輸帶能夠運輸和對耗材進行稱重,其傳輸帶具有模擬量反饋能夠測量耗材重量反饋至儀表盤
參數(尺寸/功能):
寬度:500,1000,1500,2000,單位mm
控制接口:
(1)使能:DO控制,高電平控制皮帶運轉
(2)方向:DO控制,高低電平設置轉動方向,默認正方向
(3)速度控制:Float32控制,0~10的模擬量控制速度
(4)稱重反饋:Float32反饋,模擬量顯示皮帶線上的物料重量,以KG計量
*****
## 5、1000升降傳輸
模型圖片:

用途:
用于物料和耗材的升降傳輸
參數(尺寸/功能):
寬度:500,1000,1500,2000,單位mm
控制接口:
(1)電機接口:M伺服接口,用于控制傳輸帶上下位置坐標,0~12500mm
(2)高度反饋:Float32反饋,模擬量顯示皮帶線的高度。
(3)皮帶使能:DO控制,高電平控制皮帶運轉
(4)皮帶方向:DO控制,高低電平設置轉動方向,默認正方向
(5)皮帶速度:Float32控制,0~10的模擬量控制速度
(6)下限位反饋:DI控制,皮帶線到達最低點后高電平
(7)上限位反饋:DI控制,皮帶線到達最高點后高電平
(8)光電檢測:DI控制,皮帶中間有耗材經過或遮擋時候光電高電平
*****
## 6、定位氣缸
模型圖片:

用途:
氣缸夾緊定位物料位置
參數(尺寸/功能):
尺寸:200-1500,單位mm
控制接口:
(1)氣缸使能:DO控制,高電平控制氣缸夾緊
(2)負霍爾反饋:DI控制,氣缸無使能輸出高電平
(3)正霍爾反饋:DI控制,氣缸有使能輸出高電平
*****
## 7、皮帶線附件
| 名稱 |傳送帶支架 |斜坡滑臺 |傳輸擋板 |
| --- | --- |--- |--- |
| 模型圖片| 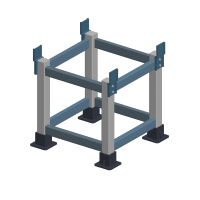 | 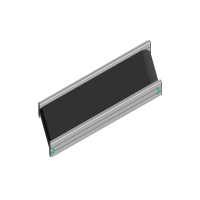 | |
| 用途 | 支撐皮帶線 | 用來導引耗材滑動到地面或其它地方 | 阻擋、保護物料 |
| 參數(尺寸/功能): | 寬度:500 ~ 3000,單位mm 長度:500 ~ 3000,單位mm 高度:500 ~ 2000,單位mm |寬度:500~3000單位mm | 入口出口: 帶倒角、無倒角;寬度:10 ~ 180 ,單位 mm;長度:200 ~ 3000,單位mm |
*****
- IOA簡介
- 軟件安裝及注冊
- 軟件安裝要求
- 西門子PLC仿真與安裝
- 博圖軟件及仿真軟件安裝
- 實體1200PLC接入IOA
- 虛擬1200PLC接入IOA
- 虛擬1500PLC接入IOA
- S7-1214接入IOA信號說明
- S7-1512接入IOA信號說明
- ZMC運動控制系列仿真與安裝
- ZMC308BE控制器說明
- ZMC308BE接入IOA仿真
- KEBA工業機器人軟件安裝使用及仿真
- 軟件安裝及維護
- IOA仿真與虛擬示教器
- IOA仿真與真實示教器
- 單片機控制與仿真
- arduino-uno控制器
- uno接入說明
- uno函數庫
- arduino-mega控制器
- mega接入說明
- mega函數庫
- ESP32物聯網單片機
- ESP32接入說明
- ESP32庫函數
- Python虛擬示教器控制器
- 虛擬機器人示教器
- 基礎模塊
- Mbus-S虛擬工廠模塊
- Mbus-R4模塊
- 物聯網模塊
- Python 環境搭建
- 視覺相機應用
- 圖像識別助手說明
- 視覺相機接入IOA方法
- 軟件注冊
- 軟件下載
- 軟件安裝
- 快速入門
- 快速上手視頻合集
- 軟件界面及基本操作
- IOA界面應用基礎操作
- UI界面說明
- 快捷鍵應用
- 3D導航模式
- 3D場景布局操作
- 控制器連接
- 11
- IOA模型庫概覽
- 物流傳輸模型庫說明
- 機械零件模型說明
- 機電單元模型說明
- 傳感交互模型說明
- 人機交互模型
- 傳感器模型
- 虛擬繼電模型
- 機器人模型
- 物料模型庫
- 移動機器人
- 建筑模型庫
- 5分鐘入門課程包
- 西門子PLC實訓課程資源包
- 工業機器人示教與編程
- ZMC運動控制與編程
- 嵌入式入門與仿真
- 系統集成與應用