
# 自定義語言的實現——解釋器模式(四)
18.4 完整解決方案
為了能夠解釋機器人控制指令,Sunny軟件公司開發人員使用解釋器模式來設計和實現機器人控制程序。針對五條文法規則,分別提供五個類來實現,其中終結符表達式direction、action和distance對應DirectionNode類、ActionNode類和DistanceNode類,非終結符表達式expression和composite對應SentenceNode類和AndNode類。
我們可以通過抽象語法樹來表示具體解釋過程,例如機器人控制指令“down run 10 and left move 20”對應的抽象語法樹如圖18-4所示:
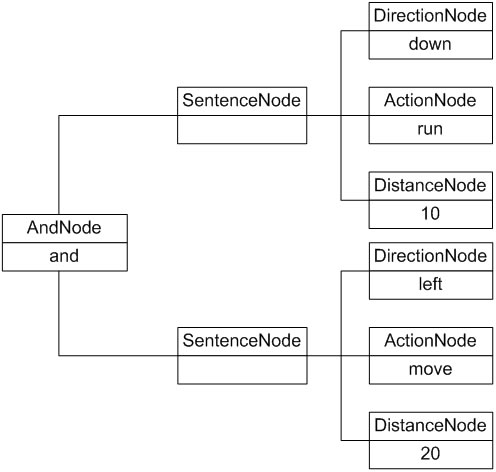
圖18-4 機器人控制程序抽象語法樹實例
機器人控制程序實例基本結構如圖18-5所示:
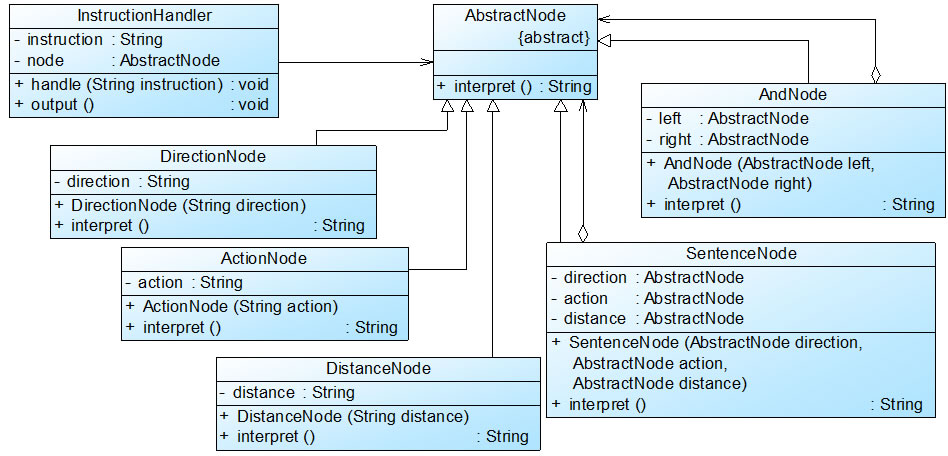
圖18-5 機器人控制程序結構圖
在圖18-5中,AbstractNode充當抽象表達式角色,DirectionNode、ActionNode和DistanceNode充當終結符表達式角色,AndNode和SentenceNode充當非終結符表達式角色。完整代碼如下所示:
```
//注:本實例對機器人控制指令的輸出結果進行模擬,將英文指令翻譯為中文指令,實際情況是調用不同的控制程序進行機器人的控制,包括對移動方向、方式和距離的控制等
import java.util.*;
//抽象表達式
abstract class AbstractNode {
public abstract String interpret();
}
//And解釋:非終結符表達式
class AndNode extends AbstractNode {
private AbstractNode left; //And的左表達式
private AbstractNode right; //And的右表達式
public AndNode(AbstractNode left, AbstractNode right) {
this.left = left;
this.right = right;
}
//And表達式解釋操作
public String interpret() {
return left.interpret() + "再" + right.interpret();
}
}
//簡單句子解釋:非終結符表達式
class SentenceNode extends AbstractNode {
private AbstractNode direction;
private AbstractNode action;
private AbstractNode distance;
public SentenceNode(AbstractNode direction,AbstractNode action,AbstractNode distance) {
this.direction = direction;
this.action = action;
this.distance = distance;
}
//簡單句子的解釋操作
public String interpret() {
return direction.interpret() + action.interpret() + distance.interpret();
}
}
//方向解釋:終結符表達式
class DirectionNode extends AbstractNode {
private String direction;
public DirectionNode(String direction) {
this.direction = direction;
}
//方向表達式的解釋操作
public String interpret() {
if (direction.equalsIgnoreCase("up")) {
return "向上";
}
else if (direction.equalsIgnoreCase("down")) {
return "向下";
}
else if (direction.equalsIgnoreCase("left")) {
return "向左";
}
else if (direction.equalsIgnoreCase("right")) {
return "向右";
}
else {
return "無效指令";
}
}
}
//動作解釋:終結符表達式
class ActionNode extends AbstractNode {
private String action;
public ActionNode(String action) {
this.action = action;
}
//動作(移動方式)表達式的解釋操作
public String interpret() {
if (action.equalsIgnoreCase("move")) {
return "移動";
}
else if (action.equalsIgnoreCase("run")) {
return "快速移動";
}
else {
return "無效指令";
}
}
}
//距離解釋:終結符表達式
class DistanceNode extends AbstractNode {
private String distance;
public DistanceNode(String distance) {
this.distance = distance;
}
//距離表達式的解釋操作
public String interpret() {
return this.distance;
}
}
//指令處理類:工具類
class InstructionHandler {
private String instruction;
private AbstractNode node;
public void handle(String instruction) {
AbstractNode left = null, right = null;
AbstractNode direction = null, action = null, distance = null;
Stack stack = new Stack(); //聲明一個棧對象用于存儲抽象語法樹
String[] words = instruction.split(" "); //以空格分隔指令字符串
for (int i = 0; i < words.length; i++) {
//本實例采用棧的方式來處理指令,如果遇到“and”,則將其后的三個單詞作為三個終結符表達式連成一個簡單句子SentenceNode作為“and”的右表達式,而將從棧頂彈出的表達式作為“and”的左表達式,最后將新的“and”表達式壓入棧中。 if (words[i].equalsIgnoreCase("and")) {
left = (AbstractNode)stack.pop(); //彈出棧頂表達式作為左表達式
String word1= words[++i];
direction = new DirectionNode(word1);
String word2 = words[++i];
action = new ActionNode(word2);
String word3 = words[++i];
distance = new DistanceNode(word3);
right = new SentenceNode(direction,action,distance); //右表達式
stack.push(new AndNode(left,right)); //將新表達式壓入棧中
}
//如果是從頭開始進行解釋,則將前三個單詞組成一個簡單句子SentenceNode并將該句子壓入棧中
else {
String word1 = words[i];
direction = new DirectionNode(word1);
String word2 = words[++i];
action = new ActionNode(word2);
String word3 = words[++i];
distance = new DistanceNode(word3);
left = new SentenceNode(direction,action,distance);
stack.push(left); //將新表達式壓入棧中
}
}
this.node = (AbstractNode)stack.pop(); //將全部表達式從棧中彈出
}
public String output() {
String result = node.interpret(); //解釋表達式
return result;
}
}
```
工具類InstructionHandler用于對輸入指令進行處理,將輸入指令分割為字符串數組,將第1個、第2個和第3個單詞組合成一個句子,并存入棧中;如果發現有單詞“and”,則將“and”后的第1個、第2個和第3個單詞組合成一個新的句子作為“and”的右表達式,并從棧中取出原先所存句子作為左表達式,然后組合成一個And節點存入棧中。依此類推,直到整個指令解析結束。
編寫如下客戶端測試代碼:
```
class Client {
public static void main(String args[]) {
String instruction = "up move 5 and down run 10 and left move 5";
InstructionHandler handler = new InstructionHandler();
handler.handle(instruction);
String outString;
outString = handler.output();
System.out.println(outString);
}
}
```
編譯并運行程序,輸出結果如下:
```
向上移動5再向下快速移動10再向左移動5
```
- Introduction
- 基礎知識
- 設計模式概述
- 從招式與內功談起——設計模式概述(一)
- 從招式與內功談起——設計模式概述(二)
- 從招式與內功談起——設計模式概述(三)
- 面向對象設計原則
- 面向對象設計原則之單一職責原則
- 面向對象設計原則之開閉原則
- 面向對象設計原則之里氏代換原則
- 面向對象設計原則之依賴倒轉原則
- 面向對象設計原則之接口隔離原則
- 面向對象設計原則之合成復用原則
- 面向對象設計原則之迪米特法則
- 六個創建型模式
- 簡單工廠模式-Simple Factory Pattern
- 工廠三兄弟之簡單工廠模式(一)
- 工廠三兄弟之簡單工廠模式(二)
- 工廠三兄弟之簡單工廠模式(三)
- 工廠三兄弟之簡單工廠模式(四)
- 工廠方法模式-Factory Method Pattern
- 工廠三兄弟之工廠方法模式(一)
- 工廠三兄弟之工廠方法模式(二)
- 工廠三兄弟之工廠方法模式(三)
- 工廠三兄弟之工廠方法模式(四)
- 抽象工廠模式-Abstract Factory Pattern
- 工廠三兄弟之抽象工廠模式(一)
- 工廠三兄弟之抽象工廠模式(二)
- 工廠三兄弟之抽象工廠模式(三)
- 工廠三兄弟之抽象工廠模式(四)
- 工廠三兄弟之抽象工廠模式(五)
- 單例模式-Singleton Pattern
- 確保對象的唯一性——單例模式 (一)
- 確保對象的唯一性——單例模式 (二)
- 確保對象的唯一性——單例模式 (三)
- 確保對象的唯一性——單例模式 (四)
- 確保對象的唯一性——單例模式 (五)
- 原型模式-Prototype Pattern
- 對象的克隆——原型模式(一)
- 對象的克隆——原型模式(二)
- 對象的克隆——原型模式(三)
- 對象的克隆——原型模式(四)
- 建造者模式-Builder Pattern
- 復雜對象的組裝與創建——建造者模式(一)
- 復雜對象的組裝與創建——建造者模式(二)
- 復雜對象的組裝與創建——建造者模式(三)
- 七個結構型模式
- 適配器模式-Adapter Pattern
- 不兼容結構的協調——適配器模式(一)
- 不兼容結構的協調——適配器模式(二)
- 不兼容結構的協調——適配器模式(三)
- 不兼容結構的協調——適配器模式(四)
- 橋接模式-Bridge Pattern
- 處理多維度變化——橋接模式(一)
- 處理多維度變化——橋接模式(二)
- 處理多維度變化——橋接模式(三)
- 處理多維度變化——橋接模式(四)
- 組合模式-Composite Pattern
- 樹形結構的處理——組合模式(一)
- 樹形結構的處理——組合模式(二)
- 樹形結構的處理——組合模式(三)
- 樹形結構的處理——組合模式(四)
- 樹形結構的處理——組合模式(五)
- 裝飾模式-Decorator Pattern
- 擴展系統功能——裝飾模式(一)
- 擴展系統功能——裝飾模式(二)
- 擴展系統功能——裝飾模式(三)
- 擴展系統功能——裝飾模式(四)
- 外觀模式-Facade Pattern
- 深入淺出外觀模式(一)
- 深入淺出外觀模式(二)
- 深入淺出外觀模式(三)
- 享元模式-Flyweight Pattern
- 實現對象的復用——享元模式(一)
- 實現對象的復用——享元模式(二)
- 實現對象的復用——享元模式(三)
- 實現對象的復用——享元模式(四)
- 實現對象的復用——享元模式(五)
- 代理模式-Proxy Pattern
- 設計模式之代理模式(一)
- 設計模式之代理模式(二)
- 設計模式之代理模式(三)
- 設計模式之代理模式(四)
- 十一個行為型模式
- 職責鏈模式-Chain of Responsibility Pattern
- 請求的鏈式處理——職責鏈模式(一)
- 請求的鏈式處理——職責鏈模式(二)
- 請求的鏈式處理——職責鏈模式(三)
- 請求的鏈式處理——職責鏈模式(四)
- 命令模式-Command Pattern
- 請求發送者與接收者解耦——命令模式(一)
- 請求發送者與接收者解耦——命令模式(二)
- 請求發送者與接收者解耦——命令模式(三)
- 請求發送者與接收者解耦——命令模式(四)
- 請求發送者與接收者解耦——命令模式(五)
- 請求發送者與接收者解耦——命令模式(六)
- 解釋器模式-Interpreter Pattern
- 自定義語言的實現——解釋器模式(一)
- 自定義語言的實現——解釋器模式(二)
- 自定義語言的實現——解釋器模式(三)
- 自定義語言的實現——解釋器模式(四)
- 自定義語言的實現——解釋器模式(五)
- 自定義語言的實現——解釋器模式(六)
- 迭代器模式-Iterator Pattern
- 遍歷聚合對象中的元素——迭代器模式(一)
- 遍歷聚合對象中的元素——迭代器模式(二)
- 遍歷聚合對象中的元素——迭代器模式(三)
- 遍歷聚合對象中的元素——迭代器模式(四)
- 遍歷聚合對象中的元素——迭代器模式(五)
- 遍歷聚合對象中的元素——迭代器模式(六)
- 中介者模式-Mediator Pattern
- 協調多個對象之間的交互——中介者模式(一)
- 協調多個對象之間的交互——中介者模式(二)
- 協調多個對象之間的交互——中介者模式(三)
- 協調多個對象之間的交互——中介者模式(四)
- 協調多個對象之間的交互——中介者模式(五)
- 備忘錄模式-Memento Pattern
- 撤銷功能的實現——備忘錄模式(一)
- 撤銷功能的實現——備忘錄模式(二)
- 撤銷功能的實現——備忘錄模式(三)
- 撤銷功能的實現——備忘錄模式(四)
- 撤銷功能的實現——備忘錄模式(五)
- 觀察者模式-Observer Pattern
- 對象間的聯動——觀察者模式(一)
- 對象間的聯動——觀察者模式(二)
- 對象間的聯動——觀察者模式(三)
- 對象間的聯動——觀察者模式(四)
- 對象間的聯動——觀察者模式(五)
- 對象間的聯動——觀察者模式(六)
- 狀態模式-State Pattern
- 處理對象的多種狀態及其相互轉換——狀態模式(一)
- 處理對象的多種狀態及其相互轉換——狀態模式(二)
- 處理對象的多種狀態及其相互轉換——狀態模式(三)
- 處理對象的多種狀態及其相互轉換——狀態模式(四)
- 處理對象的多種狀態及其相互轉換——狀態模式(五)
- 處理對象的多種狀態及其相互轉換——狀態模式(六)
- 策略模式-Strategy Pattern
- 算法的封裝與切換——策略模式(一)
- 算法的封裝與切換——策略模式(二)
- 算法的封裝與切換——策略模式(三)
- 算法的封裝與切換——策略模式(四)
- 模板方法模式-Template Method Pattern
- 模板方法模式深度解析(一)
- 模板方法模式深度解析(二)
- 模板方法模式深度解析(三)
- 訪問者模式-Visitor Pattern
- 操作復雜對象結構——訪問者模式(一)
- 操作復雜對象結構——訪問者模式(二)
- 操作復雜對象結構——訪問者模式(三)
- 操作復雜對象結構——訪問者模式(四)
- 設計模式趣味學習(復習)
- 設計模式與足球(一)
- 設計模式與足球(二)
- 設計模式與足球(三)
- 設計模式與足球(四)
- 設計模式綜合應用實例
- 多人聯機射擊游戲
- 多人聯機射擊游戲中的設計模式應用(一)
- 多人聯機射擊游戲中的設計模式應用(二)
- 數據庫同步系統
- 設計模式綜合實例分析之數據庫同步系統(一)
- 設計模式綜合實例分析之數據庫同步系統(二)
- 設計模式綜合實例分析之數據庫同步系統(三)