
:-: 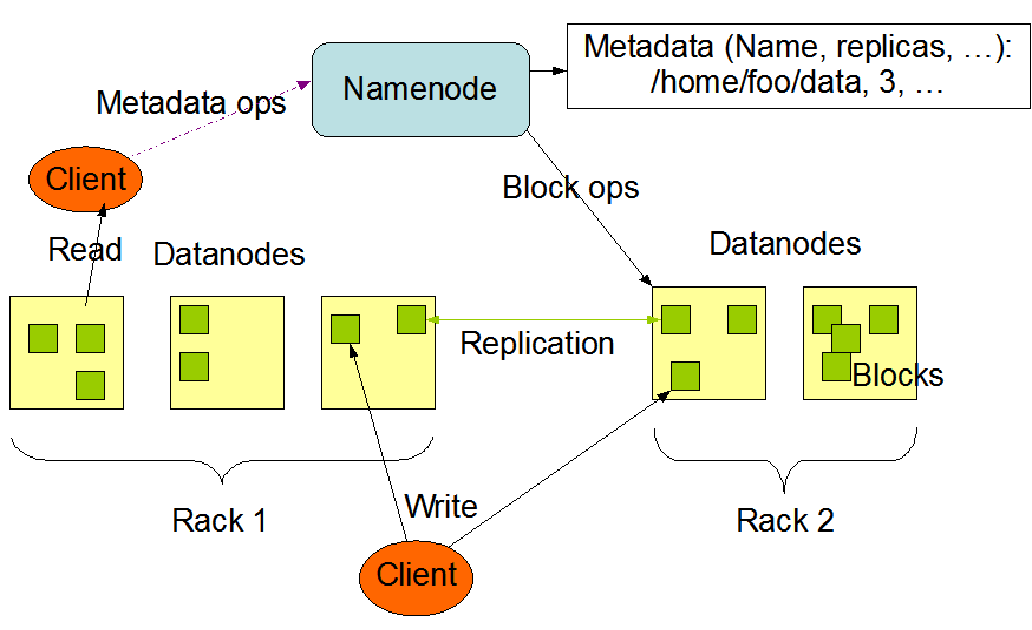
hdfs組成架構
架構主要由四個部分組成,分別為 HDFS Client、NameNode、DataNode 和Secondary NameNode。
<br/>
結合前面安裝環境啟動的進程,HDSF 啟動的時候有 NameNode、DataNode 和 Secondary NameNode進程。
<br/>
**1. Client**:就是客戶端,自己編寫的代碼+Hadoop API。其主要功能:
(1)進行文件切分。文件上傳 HDFS 的時候,Client 將文件切分成一個一個的 Block,然后進行存儲。
(2)當我們要查詢一個文件時,與 NameNode 交互,獲取文件的位置信息。
(3)與 DataNode 交互,讀取或者寫入數據。
(4)Client 提供一些命令來管理 HDFS,比如啟動或者關閉 HDFS。
(5)Client 可以通過一些命令來訪問 HDFS。
<br/>
**2. NameNode**:就是 Master,它是一個主管、管理者。也叫 HDFS 的元數據節點。集群中只能有一個活動的 NameNode 對外提供服務。
(1)管理 HDFS 的名稱空間(文件目錄樹);HDFS 很方便的一點就是對于用戶來說很友好,用戶不考慮細節的話,看到的目錄結構和我們使用 Window 和Linux 文件系統很像。
(2)管理數據塊(Block)映射信息及副本信息;一個文件對應的塊的名字以及塊被存儲在哪里,以及每一個文件備份多少都是由 NameNode 來管理。
(3)處理客戶端讀寫請求。
<br/>
**3. DataNode**:就是 Slave。實際存儲數據塊的節點,根據 NameNode 下達的命令,DataNode 執行實際的操作。
(1)存儲實際的數據塊。
(2)根據NameNode的命令執行數據塊的讀/寫操作。
<br/>
**4. Secondary NameNode**:并非 NameNode 的熱備。當 NameNode 掛掉的時候,它并不能馬上替換 NameNode 并提供服務。它的功能如下:
(1)輔助 NameNode,分擔其工作量。
(2)定期合并 Fsimage 和 Edits,并推送給 NameNode。
(3)在緊急情況下,可輔助恢復 NameNode。
Secondary NameNode 的工作與 HDFS 設計是相關的,主要針對元數據設計的。它維護了兩種文件 **Fsimage** 和 **Edits**。
<br/>
Fsimage 鏡像文件,是元數據在某個時間段的快照,Edits 記錄了生成快照之后的一系列操作。<br/>
HDFS 在最初格式化啟動時,創建 Edits 和 Fsimage 文件,并在內存中維護一版元數據信息,這時候,Fsimage 和內存中的元數據信息是相同的。后續每一次客戶端操作時,會先記錄客戶端執行的操作到 Edits 文件中,然后再更新內存中對應的目錄樹結構,比如用戶刪除一個文件,會先在 Edits 文件中記錄一個 delete 操作,然后在內存中真正刪除文件。<br/>
也就是說,內存中的元數據信息是完整的。前面生成的快照 Fsimage 只是元數據的一部分,執行完 Edits 文件中相關操作才能與內存中元數據相同。<br/>
為什么要這么設計呢?
首先,為什么不直接更新Fsimage,而是要新添加Edits文件。這里就需要明確Fsimage里面存的是元數據目錄樹信息,其實是一個內存對象序列化后的內容。要更新這個文件,首先得反序列化對象加載到內存中,在實際工作,這個文件很大,序列化和反序列化過程會很繁重,速度會很慢。而 Edits 文件只需要 append操作記錄即可。這樣既保證了元數據不會丟失,也提高了性能。<br/>
SecondaryNameNode 具體干什么事情?
當 HDFS 運行一段時間后,需要重啟動時,<ins>需要將Fsimage加載到內存中,并把Eidts文件中的操作執行一遍,才是完整的元數據信息</ins>。假如操作記錄比較頻繁或者長時間沒有重啟過,Edits 文件會很大。重啟的時候合并Fsimage+Edits文件的操作也是很耗時的,增加了啟動時間。SecondaryNameNode就是解決這種問題的,它是一個獨立的進程,<ins>定期(滿足一定條件)會將 Fsimage+Edits 合并成一個新的 Fsimage,減少 HDFS 重啟時間</ins>。
- Hadoop
- hadoop是什么?
- Hadoop組成
- hadoop官網
- hadoop安裝
- hadoop配置
- 本地運行模式配置
- 偽分布運行模式配置
- 完全分布運行模式配置
- HDFS分布式文件系統
- HDFS架構
- HDFS設計思想
- HDFS組成架構
- HDFS文件塊大小
- HDFS優缺點
- HDFS Shell操作
- HDFS JavaAPI
- 基本使用
- HDFS的I/O 流操作
- 在SpringBoot項目中的API
- HDFS讀寫流程
- HDFS寫流程
- HDFS讀流程
- NN和SNN關系
- NN和SNN工作機制
- Fsimage和 Edits解析
- checkpoint時間設置
- NameNode故障處理
- 集群安全模式
- DataNode工作機制
- 支持的文件格式
- MapReduce分布式計算模型
- MapReduce是什么?
- MapReduce設計思想
- MapReduce優缺點
- MapReduce基本使用
- MapReduce編程規范
- WordCount案例
- MapReduce任務進程
- Hadoop序列化對象
- 為什么要序列化
- 常用數據序列化類型
- 自定義序列化對象
- MapReduce框架原理
- MapReduce工作流程
- MapReduce核心類
- MapTask工作機制
- Shuffle機制
- Partition分區
- Combiner合并
- ReduceTask工作機制
- OutputFormat
- 使用MapReduce實現SQL Join操作
- Reduce join
- Reduce join 代碼實現
- Map join
- Map join 案例實操
- MapReduce 開發總結
- Hadoop 優化
- MapReduce 優化需要考慮的點
- MapReduce 優化方法
- 分布式資源調度框架 Yarn
- Yarn 基本架構
- ResourceManager(RM)
- NodeManager(NM)
- ApplicationMaster
- Container
- 作業提交全過程
- JobHistoryServer 使用
- 資源調度器
- 先進先出調度器(FIFO)
- 容量調度器(Capacity Scheduler)
- 公平調度器(Fair Scheduler)
- Yarn 常用命令
- Zookeeper
- zookeeper是什么?
- zookeeper完全分布式搭建
- Zookeeper特點
- Zookeeper數據結構
- Zookeeper 內部原理
- 選舉機制
- stat 信息中字段解釋
- 選擇機制中的概念
- 選舉消息內容
- 監聽器原理
- Hadoop 高可用集群搭建
- Zookeeper 應用
- Zookeeper Shell操作
- Zookeeper Java應用
- Hive
- Hive是什么?
- Hive的優缺點
- Hive架構
- Hive元數據存儲模式
- 內嵌模式
- 本地模式
- 遠程模式
- Hive環境搭建
- 偽分布式環境搭建
- Hive命令工具
- 命令行模式
- 交互模式
- Hive數據類型
- Hive數據結構
- 參數配置方式
- Hive數據庫
- 數據庫存儲位置
- 數據庫操作
- 表的創建
- 建表基本語法
- 內部表
- 外部表
- 臨時表
- 建表高階語句
- 表的刪除與修改
- 分區表
- 靜態分區
- 動態分區
- 分桶表
- 創建分桶表
- 分桶抽樣
- Hive視圖
- 視圖的創建
- 側視圖Lateral View
- Hive數據導入導出
- 導入數據
- 導出數據
- 查詢表數據量
- Hive事務
- 事務是什么?
- Hive事務的局限性和特點
- Hive事務的開啟和設置
- Hive PLSQL
- Hive高階查詢
- 查詢基本語法
- 基本查詢
- distinct去重
- where語句
- 列正則表達式
- 虛擬列
- CTE查詢
- 嵌套查詢
- join語句
- 內連接
- 左連接
- 右連接
- 全連接
- 多表連接
- 笛卡爾積
- left semi join
- group by分組
- having刷選
- union與union all
- 排序
- order by
- sort by
- distribute by
- cluster by
- 聚合運算
- 基本聚合
- 高級聚合
- 窗口函數
- 序列窗口函數
- 聚合窗口函數
- 分析窗口函數
- 窗口函數練習
- 窗口子句
- Hive函數
- Hive函數分類
- 字符串函數
- 類型轉換函數
- 數學函數
- 日期函數
- 集合函數
- 條件函數
- 聚合函數
- 表生成函數
- 自定義Hive函數
- 自定義函數分類
- 自定義Hive函數流程
- 添加JAR包的方式
- 自定義臨時函數
- 自定義永久函數
- Hive優化
- Hive性能調優工具
- EXPLAIN
- ANALYZE
- Fetch抓取
- 本地模式
- 表的優化
- 小表 join 大表
- 大表 join 大表
- 開啟Map Join
- group by
- count(distinct)
- 笛卡爾積
- 行列過濾
- 動態分區調整
- 分區分桶表
- 數據傾斜
- 數據傾斜原因
- 調整Map數
- 調整Reduce數
- 產生數據傾斜的場景
- 并行執行
- 嚴格模式
- JVM重用
- 推測執行
- 啟用CBO
- 啟動矢量化
- 使用Tez引擎
- 壓縮算法和文件格式
- 文件格式
- 壓縮算法
- Zeppelin
- Zeppelin是什么?
- Zeppelin安裝
- 配置Hive解釋器
- Hbase
- Hbase是什么?
- Hbase環境搭建
- Hbase分布式環境搭建
- Hbase偽分布式環境搭建
- Hbase架構
- Hbase架構組件
- Hbase數據存儲結構
- Hbase原理
- Hbase Shell
- 基本操作
- 表操作
- namespace
- Hbase Java Api
- Phoenix集成Hbase
- Phoenix是什么?
- 安裝Phoenix
- Phoenix數據類型
- Phoenix Shell
- HBase與Hive集成
- HBase與Hive的對比
- HBase與Hive集成使用
- Hbase與Hive集成原理
- HBase優化
- RowKey設計
- 內存優化
- 基礎優化
- Hbase管理
- 權限管理
- Region管理
- Region的自動拆分
- Region的預拆分
- 到底采用哪種拆分策略?
- Region的合并
- HFile的合并
- 為什么要有HFile的合并
- HFile合并方式
- Compaction執行時間
- Compaction相關控制參數
- 演示示例
- Sqoop
- Sqoop是什么?
- Sqoop環境搭建
- RDBMS導入到HDFS
- RDBMS導入到Hive
- RDBMS導入到Hbase
- HDFS導出到RDBMS
- 使用sqoop腳本
- Sqoop常用命令
- Hadoop數據模型
- TextFile
- SequenceFile
- Avro
- Parquet
- RC&ORC
- 文件存儲格式比較
- Spark
- Spark是什么?
- Spark優勢
- Spark與MapReduce比較
- Spark技術棧
- Spark安裝
- Spark Shell
- Spark架構
- Spark編程入口
- 編程入口API
- SparkContext
- SparkSession
- Spark的maven依賴
- Spark RDD編程
- Spark核心數據結構-RDD
- RDD 概念
- RDD 特性
- RDD編程
- RDD編程流程
- pom依賴
- 創建算子
- 轉換算子
- 動作算子
- 持久化算子
- RDD 與閉包
- csv/json數據源
- Spark分布式計算原理
- RDD依賴
- RDD轉換
- RDD依賴
- DAG工作原理
- Spark Shuffle原理
- Shuffle的作用
- ShuffleManager組件
- Shuffle實踐
- RDD持久化
- 緩存機制
- 檢查點
- 檢查點與緩存的區別
- RDD共享變量
- 廣播變量
- 累計器
- RDD分區設計
- 數據傾斜
- 數據傾斜的根本原因
- 定位導致的數據傾斜
- 常見數據傾斜解決方案
- Spark SQL
- SQL on Hadoop
- Spark SQL是什么
- Spark SQL特點
- Spark SQL架構
- Spark SQL運行原理
- Spark SQL編程
- Spark SQL編程入口
- 創建Dataset
- Dataset是什么
- SparkSession創建Dataset
- 樣例類創建Dataset
- 創建DataFrame
- DataFrame是什么
- 結構化數據文件創建DataFrame
- RDD創建DataFrame
- Hive表創建DataFrame
- JDBC創建DataFrame
- SparkSession創建
- RDD、DataFrame、Dataset
- 三者對比
- 三者相互轉換
- RDD轉換為DataFrame
- DataFrame轉換為RDD
- DataFrame API
- DataFrame API分類
- Action 操作
- 基礎 Dataset 函數
- 強類型轉換
- 弱類型轉換
- Spark SQL外部數據源
- Parquet文件
- Hive表
- RDBMS表
- JSON/CSV
- Spark SQL函數
- Spark SQL內置函數
- 自定SparkSQL函數
- Spark SQL CLI
- Spark SQL性能優化
- Spark GraphX圖形數據分析
- 為什么需要圖計算
- 圖的概念
- 圖的術語
- 圖的經典表示法
- Spark Graphix簡介
- Graphx核心抽象
- Graphx Scala API
- 核心組件
- 屬性圖應用示例1
- 屬性圖應用示例2
- 查看圖信息
- 圖的算子
- 連通分量
- PageRank算法
- Pregel分布式計算框架
- Flume日志收集
- Flume是什么?
- Flume官方文檔
- Flume架構
- Flume安裝
- Flume使用過程
- Flume組件
- Flume工作流程
- Flume事務
- Source、Channel、Sink文檔
- Source文檔
- Channel文檔
- Sink文檔
- Flume攔截器
- Flume攔截器概念
- 配置攔截器
- 自定義攔截器
- Flume可靠性保證
- 故障轉移
- 負載均衡
- 多層代理
- 多路復用
- Kafka
- 消息中間件MQ
- Kafka是什么?
- Kafka安裝
- Kafka本地單機部署
- Kafka基本命令使用
- Topic的生產與消費
- 基本命令
- 查看kafka目錄
- Kafka架構
- Kafka Topic
- Kafka Producer
- Kafka Consumer
- Kafka Partition
- Kafka Message
- Kafka Broker
- 存儲策略
- ZooKeeper在Kafka中的作用
- 副本同步
- 容災
- 高吞吐
- Leader均衡機制
- Kafka Scala API
- Producer API
- Consumer API
- Kafka優化
- 消費者參數優化
- 生產者參數優化
- Spark Streaming
- 什么是流?
- 批處理和流處理
- Spark Streaming簡介
- 流數據處理架構
- 內部工作流程
- StreamingContext組件
- SparkStreaming的編程入口
- WordCount案例
- DStream
- DStream是什么?
- Input DStream與Receivers接收器
- DStream API
- 轉換操作
- 輸出操作
- 數據源
- 數據源分類
- Socket數據源
- 統計HDFS文件的詞頻
- 處理狀態數據
- SparkStreaming整合SparkSQL
- SparkStreaming整合Flume
- SparkStreaming整合Kafka
- 自定義數據源
- Spark Streaming優化策略
- 優化運行時間
- 優化內存使用
- 數據倉庫
- 數據倉庫是什么?
- 數據倉庫的意義
- 數據倉庫和數據庫的區別
- OLTP和OLAP的區別
- OLTP的特點
- OLAP的特點
- OLTP與OLAP對比
- 數據倉庫架構
- Inmon架構
- Kimball架構
- 混合型架構
- 數據倉庫的解決方案
- 數據ETL
- 數據倉庫建模流程
- 維度模型
- 星型模式
- 雪花模型
- 星座模型
- 數據ETL處理
- 數倉分層術語
- 數據抽取方式
- CDC抽取方案
- 數據轉換
- 常見的ETL工具