
# 使用邏輯回歸
> 原文:[https://www.textbook.ds100.org/ch/17/classification_log_reg.html](https://www.textbook.ds100.org/ch/17/classification_log_reg.html)
```
# HIDDEN
# Clear previously defined variables
%reset -f
# Set directory for data loading to work properly
import os
os.chdir(os.path.expanduser('~/notebooks/17'))
```
```
# HIDDEN
import warnings
# Ignore numpy dtype warnings. These warnings are caused by an interaction
# between numpy and Cython and can be safely ignored.
# Reference: https://stackoverflow.com/a/40846742
warnings.filterwarnings("ignore", message="numpy.dtype size changed")
warnings.filterwarnings("ignore", message="numpy.ufunc size changed")
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd
import seaborn as sns
%matplotlib inline
import ipywidgets as widgets
from ipywidgets import interact, interactive, fixed, interact_manual
import nbinteract as nbi
sns.set()
sns.set_context('talk')
np.set_printoptions(threshold=20, precision=2, suppress=True)
pd.options.display.max_rows = 7
pd.options.display.max_columns = 8
pd.set_option('precision', 2)
# This option stops scientific notation for pandas
# pd.set_option('display.float_format', '{:.2f}'.format)
```
```
# HIDDEN
def df_interact(df, nrows=7, ncols=7):
'''
Outputs sliders that show rows and columns of df
'''
def peek(row=0, col=0):
return df.iloc[row:row + nrows, col:col + ncols]
if len(df.columns) <= ncols:
interact(peek, row=(0, len(df) - nrows, nrows), col=fixed(0))
else:
interact(peek,
row=(0, len(df) - nrows, nrows),
col=(0, len(df.columns) - ncols))
print('({} rows, {} columns) total'.format(df.shape[0], df.shape[1]))
```
```
# HIDDEN
from scipy.optimize import minimize as sci_min
def minimize(cost_fn, grad_cost_fn, X, y, progress=True):
'''
Uses scipy.minimize to minimize cost_fn using a form of gradient descent.
'''
theta = np.zeros(X.shape[1])
iters = 0
def objective(theta):
return cost_fn(theta, X, y)
def gradient(theta):
return grad_cost_fn(theta, X, y)
def print_theta(theta):
nonlocal iters
if progress and iters % progress == 0:
print(f'theta: {theta} | cost: {cost_fn(theta, X, y):.2f}')
iters += 1
print_theta(theta)
return sci_min(
objective, theta, method='BFGS', jac=gradient, callback=print_theta,
tol=1e-7
).x
```
我們已經開發了邏輯回歸的所有組件。首先,用于預測概率的邏輯模型:
$$ \begin{aligned} f_\hat{\boldsymbol{\theta}} (\textbf{x}) = \sigma(\hat{\boldsymbol{\theta}} \cdot \textbf{x}) \end{aligned} $$
然后,交叉熵損失函數:
$$ \begin{aligned} L(\boldsymbol{\theta}, \textbf{X}, \textbf{y}) = &= \frac{1}{n} \sum_i \left(- y_i \ln \sigma_i - (1 - y_i) \ln (1 - \sigma_i ) \right) \\ \end{aligned} $$
最后,梯度下降的交叉熵損失的梯度:
$$ \begin{aligned} \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}, \textbf{X}, \textbf{y}) &= - \frac{1}{n} \sum_i \left( y_i - \sigma_i \right) \textbf{X}_i \\ \end{aligned} $$
在上面的表達式中,我們讓$\textbf \x;$表示 p$輸入數據矩陣的$n 乘以 p$輸入值,$\textbf \123\ \,$\textbf \,$\textbf \123\123 123 123 123 123 \ 123 \ \123 \\\\Thet 公司 A 美元。簡而言之,我們定義了$\sigma \boldsymbol \theta(\textbf x u i)=\sigma(\textbf x u i \cdot \hat \boldsymbol \theta)。
## 勒布朗射門的邏輯回歸
現在讓我們回到本章開頭所面臨的問題:預測勒布朗·詹姆斯將要投哪一球。我們從加載勒布朗在 2017 年 NBA 季后賽中拍攝的照片開始。
```
lebron = pd.read_csv('lebron.csv')
lebron
```
| | 游戲日期 | 分鐘 | 對手 | 動作類型 | 鏡頭類型 | 射擊距離 | 拍攝 |
| --- | --- | --- | --- | --- | --- | --- | --- |
| 零 | 20170415 年 | 10 個 | 因德 | 駕駛上籃得分 | 2pt 現場目標 | 零 | 0 |
| --- | --- | --- | --- | --- | --- | --- | --- |
| 1 個 | 20170415 | 11 個 | IND | Driving Layup Shot | 2PT Field Goal | 0 | 1 個 |
| --- | --- | --- | --- | --- | --- | --- | --- |
| 二 | 20170415 | 十四 | IND | 上籃得分 | 2PT Field Goal | 0 | 1 |
| --- | --- | --- | --- | --- | --- | --- | --- |
| …… | …… | ... | ... | ... | ... | ... | ... |
| --- | --- | --- | --- | --- | --- | --- | --- |
| 三百八十一 | 20170612 年 | 46 歲 | GSW | Driving Layup Shot | 2PT Field Goal | 1 | 1 |
| --- | --- | --- | --- | --- | --- | --- | --- |
| 382 個 | 20170612 | 47 歲 | GSW | 后仰跳投 | 2PT Field Goal | 14 | 0 |
| --- | --- | --- | --- | --- | --- | --- | --- |
| 三百八十三 | 20170612 | 48 歲 | GSW | Driving Layup Shot | 2PT Field Goal | 二 | 1 |
| --- | --- | --- | --- | --- | --- | --- | --- |
384 行×7 列
我們在下面包含了一個小部件,允許您瀏覽整個數據幀。
```
df_interact(lebron)
```
<button class="js-nbinteract-widget">Loading widgets...</button>
```
(384 rows, 7 columns) total
```
我們首先只使用拍攝距離來預測拍攝是否進行。`scikit-learn`方便地提供了一個邏輯回歸分類器作為[`sklearn.linear_model.LogisticRegression`](http://scikit-learn.org/stable/modules/generated/sklearn.linear_model.LogisticRegression.html)類。為了使用這個類,我們首先創建數據矩陣`X`和觀察結果向量`y`。
```
X = lebron[['shot_distance']].as_matrix()
y = lebron['shot_made'].as_matrix()
print('X:')
print(X)
print()
print('y:')
print(y)
```
```
X:
[[ 0]
[ 0]
[ 0]
...
[ 1]
[14]
[ 2]]
y:
[0 1 1 ... 1 0 1]
```
按照慣例,我們將數據分成一個訓練集和一個測試集。
```
from sklearn.model_selection import train_test_split
X_train, X_test, y_train, y_test = train_test_split(
X, y, test_size=40, random_state=42
)
print(f'Training set size: {len(y_train)}')
print(f'Test set size: {len(y_test)}')
```
```
Training set size: 344
Test set size: 40
```
`scikit-learn`使初始化分類器并將其安裝在`X_train`和`y_train`上變得簡單:
```
from sklearn.linear_model import LogisticRegression
simple_clf = LogisticRegression()
simple_clf.fit(X_train, y_train)
```
```
LogisticRegression(C=1.0, class_weight=None, dual=False, fit_intercept=True,
intercept_scaling=1, max_iter=100, multi_class='ovr', n_jobs=1,
penalty='l2', random_state=None, solver='liblinear', tol=0.0001,
verbose=0, warm_start=False)
```
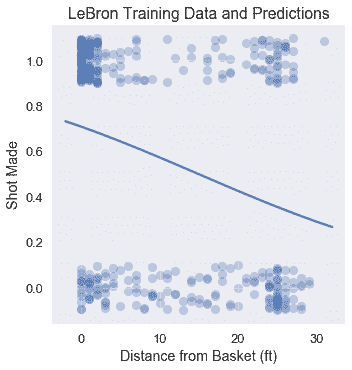
為了可視化分類器的性能,我們繪制了原始點和分類器的預測概率。
```
# HIDDEN
np.random.seed(42)
sns.lmplot(x='shot_distance', y='shot_made',
data=lebron,
fit_reg=False, ci=False,
y_jitter=0.1,
scatter_kws={'alpha': 0.3})
xs = np.linspace(-2, 32, 100)
ys = simple_clf.predict_proba(xs.reshape(-1, 1))[:, 1]
plt.plot(xs, ys)
plt.title('LeBron Training Data and Predictions')
plt.xlabel('Distance from Basket (ft)')
plt.ylabel('Shot Made');
```
## 正在評估分類器[?](#Evaluating-the-Classifier)
評估分類器有效性的一種方法是檢查其預測精度:它正確預測的點數比例是多少?
```
simple_clf.score(X_test, y_test)
```
```
0.6
```
我們的分類器在測試集上實現了相當低的精度 0.60。如果我們的分類器只是隨機地猜測每個點,那么我們期望精度為 0.50。事實上,如果我們的分類器簡單地預測到 Lebron 的每一次射門都會成功,我們也會得到 0.60 的準確度:
```
# Calculates the accuracy if we always predict 1
np.count_nonzero(y_test == 1) / len(y_test)
```
```
0.6
```
對于這個分類器,我們只使用了幾個可能的特性中的一個。在多變量線性回歸中,我們可能通過合并更多的特征來實現更精確的分類器。
## 多變量邏輯回歸
在我們的分類器中合并更多的數字特性就如同從`lebron`數據幀中提取額外的列到`X`矩陣中一樣簡單。另一方面,結合分類特征需要我們應用一個熱編碼。在下面的代碼中,我們使用`minute`、`opponent`、`action_type`和`shot_type`功能增強了分類器,使用`scikit-learn`中的`DictVectorizer`類對分類變量應用一個熱編碼。
```
from sklearn.feature_extraction import DictVectorizer
columns = ['shot_distance', 'minute', 'action_type', 'shot_type', 'opponent']
rows = lebron[columns].to_dict(orient='row')
onehot = DictVectorizer(sparse=False).fit(rows)
X = onehot.transform(rows)
y = lebron['shot_made'].as_matrix()
X.shape
```
```
(384, 42)
```
我們將再次將數據分為訓練集和測試集:
```
X_train, X_test, y_train, y_test = train_test_split(
X, y, test_size=40, random_state=42
)
print(f'Training set size: {len(y_train)}')
print(f'Test set size: {len(y_test)}')
```
```
Training set size: 344
Test set size: 40
```
最后,我們再次調整模型并檢查其準確性:
```
clf = LogisticRegression()
clf.fit(X_train, y_train)
print(f'Test set accuracy: {clf.score(X_test, y_test)}')
```
```
Test set accuracy: 0.725
```
這個分類器比只考慮射擊距離的分類器精確 12%左右。在第 17.7 節中,我們探討了用于評估分類器性能的其他指標。
## 摘要[?](#Summary)
我們開發了使用邏輯回歸進行分類所需的數學和計算機制。邏輯回歸因其預測簡單有效而得到廣泛應用。
- 一、數據科學的生命周期
- 二、數據生成
- 三、處理表格數據
- 四、數據清理
- 五、探索性數據分析
- 六、數據可視化
- Web 技術
- 超文本傳輸協議
- 處理文本
- python 字符串方法
- 正則表達式
- regex 和 python
- 關系數據庫和 SQL
- 關系模型
- SQL
- SQL 連接
- 建模與估計
- 模型
- 損失函數
- 絕對損失和 Huber 損失
- 梯度下降與數值優化
- 使用程序最小化損失
- 梯度下降
- 凸性
- 隨機梯度下降法
- 概率與泛化
- 隨機變量
- 期望和方差
- 風險
- 線性模型
- 預測小費金額
- 用梯度下降擬合線性模型
- 多元線性回歸
- 最小二乘-幾何透視
- 線性回歸案例研究
- 特征工程
- 沃爾瑪數據集
- 預測冰淇淋評級
- 偏方差權衡
- 風險和損失最小化
- 模型偏差和方差
- 交叉驗證
- 正規化
- 正則化直覺
- L2 正則化:嶺回歸
- L1 正則化:LASSO 回歸
- 分類
- 概率回歸
- Logistic 模型
- Logistic 模型的損失函數
- 使用邏輯回歸
- 經驗概率分布的近似
- 擬合 Logistic 模型
- 評估 Logistic 模型
- 多類分類
- 統計推斷
- 假設檢驗和置信區間
- 置換檢驗
- 線性回歸的自舉(真系數的推斷)
- 學生化自舉
- P-HACKING
- 向量空間回顧
- 參考表
- Pandas
- Seaborn
- Matplotlib
- Scikit Learn