
我們稱為**偏差**。由于時鐘到每個寄存器的路徑延遲不一樣,
造成信號到達 **clock pin(時鐘引腳)** 的時間也不一樣,我們把時鐘信號到達不同寄存器的時間偏差稱為skew。一直以來,Skew都是衡量時鐘樹性能的重要參數,傳統CTS的目的就是為了減小skew。
Skew的類型分為很多種,根據clock和data path的方向,skew可以分為**positive skew**和**negative skew**。如下圖所示:
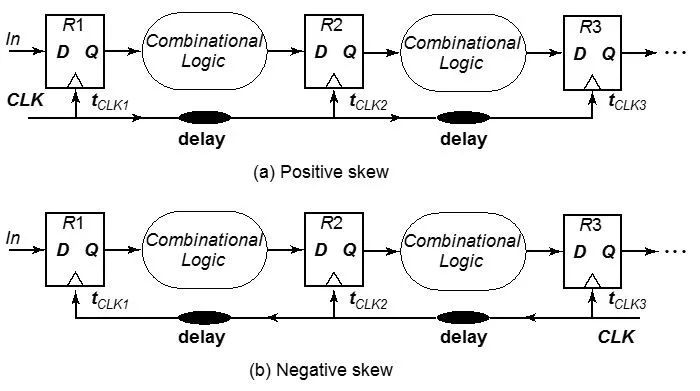
對于positive skew,clock和data path在相同方向上。反之對negative skew來說,clock和data path在相反方向上。那它們對我們的design有什么影響呢?我們來看一下setup和hold的計算公式:
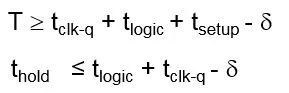
我們可以得到以下結果,
> 對于positive skew來說,它可以減少T的時間,相當于提升芯片的performace。但是它的hold時間會變得更加難以滿足
> 對于negative skew來說,它的hold時間更加容易滿足,取而代之的是,它會降低芯片的性能。
還有另外一種skew的分類方法,是我們更為常見的,根據時鐘域以及路徑關系, skew 可以分為**global skew**,**local skew**,**interclock skew**。
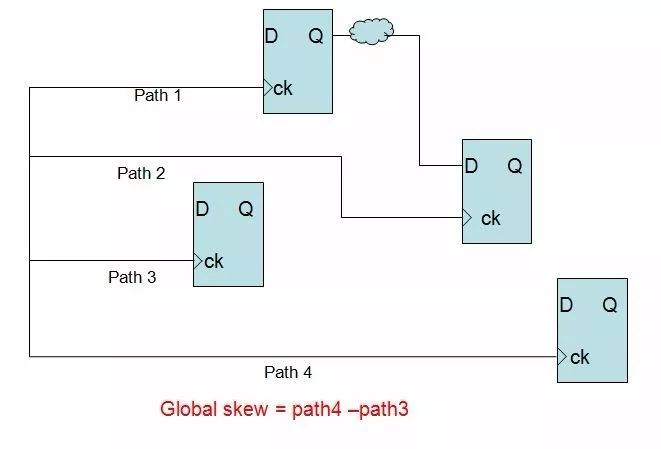
Global skew 是指,同一時鐘域,任意兩個路徑的最大 skew 。如下圖所示,注意是任意兩條路徑,不管是不是timing path,都會算作gloabl skew計算的對象。CTS時,工具更關注的是global skew, 會盡可能地將global skew做小。
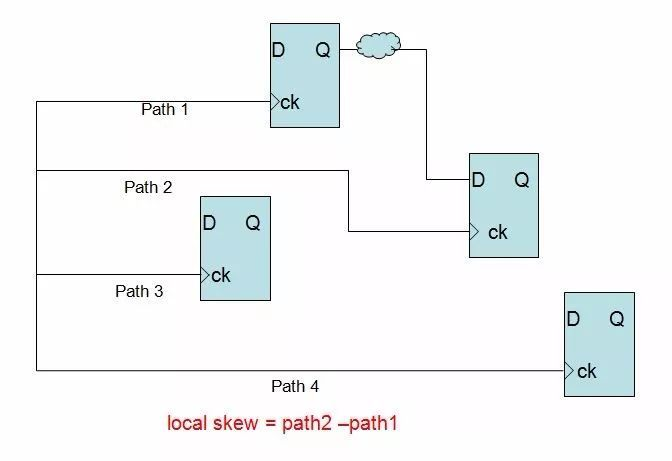
Local skew 是指,同一時鐘域,任意兩個有邏輯關聯關系的路徑最大 skew 。這邊需要注明,必須是存在邏輯關系的path才會計算local skew,也就是說必須要是timing path。如下圖所示,我們在分析timing的時候,更多地是關注local skew。
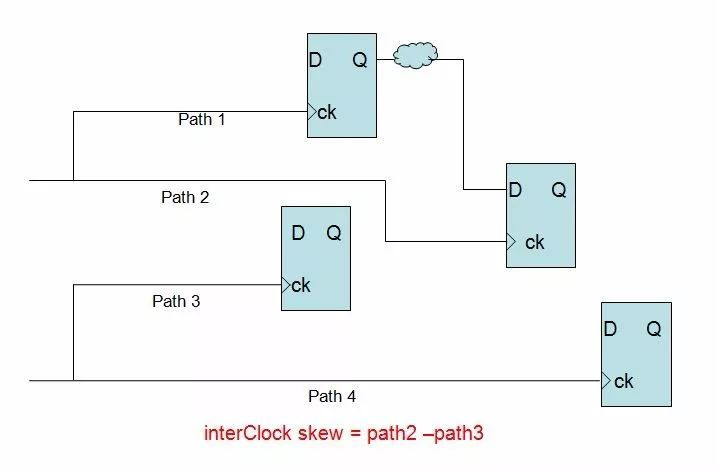
interClock skew 是指,不同時鐘域之間路徑的最大 skew,如下圖所示:
另外還有一種比較特使的skew,就是現如今用得較多的useful skew,我們稱為**有用偏差**。一般來說,skew會惡化timing結果,但如果合理使用,那skew也可以起到修復timing的作用,從而提高設計的頻率。
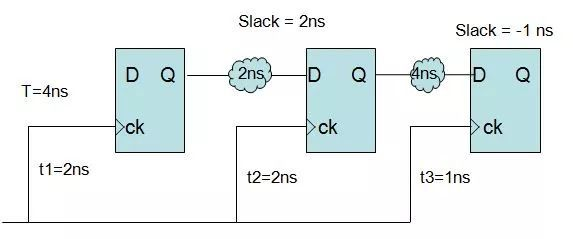
如下圖:時鐘周期為 4ns ,各時鐘路徑延遲如下:可以看到有一條路徑的 slack 為 -1ns ,說明這條路徑違規。可以看到與這條路徑相關的 skew 是 t3-t2= -1ns 。
下面我們利用 useful skew 向前面一個 slack 比較充裕的路徑(slack=2ns)借用1ns的 時間 ,這樣兩條path都meet了時序要求。如下圖:
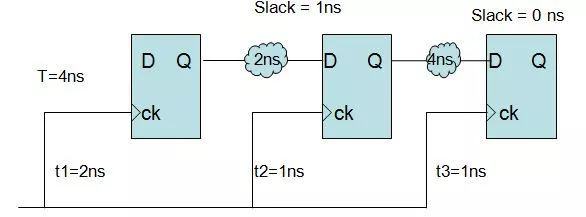
這就是 usefulskew 的作用,可以向前,或者向后借time來修正 violation。
- 電子元器件
- 電阻
- 電容器
- 電感
- 保險絲
- 二極管
- 三極管
- 接插件
- 蜂鳴器
- MOS
- 集成電器基礎知識
- 接地的基礎知識
- STA
- Skew
- setup和hold
- 問題
- timing path
- Latency
- 跨時鐘域的代碼檢查(spyglass)
- 時間換算
- 名詞解釋
- 寄存器
- 觸發器
- ECO
- 通用芯片和嵌入式芯片有什么區別
- Signoff
- SOC
- VLSI
- NPU
- DDR
- ISP
- Fan-in 和 Fan-out
- 邏輯閾值
- Floorplan
- 寄存器傳輸的設計(RTL)
- 集成電路設計方法
- Design Rules of Thumb
- Dealing with Resistance
- 芯片設計
- 什么是Scenario?
- 晶圓BUMP加工工藝和原理
- wafer、die、cell
- DFT
- 前端-QC
- CDC
- SDC
- MBIST
- RDC
- Lint
- overview
- PV
- PBA/GPA
- Corner
- PVT
- latency與delay區別
- Power
- LVT, RVT, HVT 的區別
- PPA
- RTL
- 芯片行業的IP是指什么?
- 晶振與晶體的區別
- PLL (鎖相環(PhaseLockedLoop))
- 奇偶分頻電路
- inverter
- glitch (電子脈沖)
- Power
- Clock Gating
- 低功耗設計
- UPF
- 低功耗單元庫
- Power intent
- 亞穩態
- 芯片流程
- 芯片軟件
- 亞穩態&MTBF&同步器&AFIFO
- glitch free的時鐘切換技術
- max_transition
- MUX
- STA之RC Corner
- process corner 和 PVT
- ICC Scenario Definition
- 寄生電路?
- 晶振
- 信號完整性
- 什么是脈沖?什么是電平?
- 閾值電壓
- bump
- IC設計常用文件及格式介紹
- 文件格式
- spef
- 后端
- phy芯片的作用
- MIPI簡介
- 異步橋
- 芯片后仿之SDF
- 慕課-VLSI設計基礎(數字集成電路設計基礎)
- 概論
- MOS晶體管原理
- 設計與工藝接口
- 反相器和組合邏輯電路
- 問題trainning