
# 如何開發時間序列預測的卷積神經網絡模型
> 原文: [https://machinelearningmastery.com/how-to-develop-convolutional-neural-network-models-for-time-series-forecasting/](https://machinelearningmastery.com/how-to-develop-convolutional-neural-network-models-for-time-series-forecasting/)
卷積神經網絡模型(簡稱 CNN)可以應用于時間序列預測。
有許多類型的 CNN 模型可用于每種特定類型的時間序列預測問題。
在本教程中,您將了解如何針對一系列標準時間序列預測問題開發一套 CNN 模型。
本教程的目的是為每種類型的時間序列問題提供每個模型的獨立示例,作為模板,您可以根據特定的時間序列預測問題進行復制和調整。
完成本教程后,您將了解:
* 如何開發 CNN 模型進行單變量時間序列預測。
* 如何開發 CNN 模型進行多元時間序列預測。
* 如何開發 CNN 模型進行多步時間序列預測。
這是一個龐大而重要的職位;您可能希望將其加入書簽以供將來參考。
讓我們開始吧。

如何開發用于時間序列預測的卷積神經網絡模型
照片由[土地管理局](https://www.flickr.com/photos/blmoregon/35464087364/),保留一些權利。
## 教程概述
在本教程中,我們將探討如何為時間序列預測開發一套不同類型的 CNN 模型。
這些模型在小型設計的時間序列問題上進行了演示,旨在解決時間序列問題類型的風格。所選擇的模型配置是任意的,并未針對每個問題進行優化;那不是目標。
本教程分為四個部分;他們是:
1. 單變量 CNN 模型
2. 多變量 CNN 模型
3. 多步 CNN 模型
4. 多變量多步 CNN 模型
## 單變量 CNN 模型
雖然傳統上為二維圖像數據開發,但 CNN 可用于模擬單變量時間序列預測問題。
單變量時間序列是由具有時間排序的單個觀察序列組成的數據集,并且需要模型來從過去的一系列觀察中學習以預測序列中的下一個值。
本節分為兩部分;他們是:
1. 數據準備
2. CNN 模型
### 數據準備
在對單變量系列進行建模之前,必須準備好它。
CNN 模型將學習將過去觀察序列作為輸入映射到輸出觀察的函數。因此,必須將觀察序列轉換為模型可以從中學習的多個示例。
考慮給定的單變量序列:
```py
[10, 20, 30, 40, 50, 60, 70, 80, 90]
```
我們可以將序列劃分為多個稱為樣本的輸入/輸出模式,其中三個時間步長用作輸入,一個時間步長用作正在學習的一步預測的輸出。
```py
X, y
10, 20, 30 40
20, 30, 40 50
30, 40, 50 60
...
```
下面的 _split_sequence()_ 函數實現了這種行為,并將給定的單變量序列分成多個樣本,其中每個樣本具有指定的時間步長,輸出是單個時間步長。
```py
# split a univariate sequence into samples
def split_sequence(sequence, n_steps):
X, y = list(), list()
for i in range(len(sequence)):
# find the end of this pattern
end_ix = i + n_steps
# check if we are beyond the sequence
if end_ix > len(sequence)-1:
break
# gather input and output parts of the pattern
seq_x, seq_y = sequence[i:end_ix], sequence[end_ix]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
```
我們可以在上面的小型人為數據集上演示這個功能。
下面列出了完整的示例。
```py
# univariate data preparation
from numpy import array
# split a univariate sequence into samples
def split_sequence(sequence, n_steps):
X, y = list(), list()
for i in range(len(sequence)):
# find the end of this pattern
end_ix = i + n_steps
# check if we are beyond the sequence
if end_ix > len(sequence)-1:
break
# gather input and output parts of the pattern
seq_x, seq_y = sequence[i:end_ix], sequence[end_ix]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
raw_seq = [10, 20, 30, 40, 50, 60, 70, 80, 90]
# choose a number of time steps
n_steps = 3
# split into samples
X, y = split_sequence(raw_seq, n_steps)
# summarize the data
for i in range(len(X)):
print(X[i], y[i])
```
運行該示例將單變量系列分成六個樣本,其中每個樣本具有三個輸入時間步長和一個輸出時間步長。
```py
[10 20 30] 40
[20 30 40] 50
[30 40 50] 60
[40 50 60] 70
[50 60 70] 80
[60 70 80] 90
```
現在我們知道如何準備一個單變量系列進行建模,讓我們看看開發一個可以學習輸入到輸出映射的 CNN 模型。
### CNN 模型
一維 CNN 是 CNN 模型,其具有在 1D 序列上操作的卷積隱藏層。接下來可能在某些情況下可能是第二個卷積層,例如非常長的輸入序列,然后是池化層,其作用是將卷積層的輸出提取到最顯著的元素。
卷積和匯集層之后是密集的完全連接層,其解釋由模型的卷積部分提取的特征。在卷積層和密集層之間使用展平層以將特征映射減少為單個一維向量。
我們可以如下定義用于單變量時間序列預測的 1D CNN 模型。
```py
# define model
model = Sequential()
model.add(Conv1D(filters=64, kernel_size=2, activation='relu', input_shape=(n_steps, n_features)))
model.add(MaxPooling1D(pool_size=2))
model.add(Flatten())
model.add(Dense(50, activation='relu'))
model.add(Dense(1))
model.compile(optimizer='adam', loss='mse')
```
定義的關鍵是輸入的形狀;這就是模型期望的每個樣本的輸入,包括時間步數和特征數。
我們正在使用單變量系列,因此對于一個變量,要素的數量是一個。
輸入的時間步數是我們在準備數據集時選擇的數字,作為 _split_sequence()_ 函數的參數。
每個樣本的輸入形狀在第一個隱藏層定義的 _input_shape_ 參數中指定。
我們幾乎總是有多個樣本,因此,模型將期望訓練數據的輸入組件具有尺寸或形狀:
```py
[samples, timesteps, features]
```
我們在前一節中的 _split_sequence()_ 函數輸出具有[_ 樣本,時間步長 _]形狀??的 X,因此我們可以輕松地對其進行整形,以便為一個特征提供額外的維度。
```py
# reshape from [samples, timesteps] into [samples, timesteps, features]
n_features = 1
X = X.reshape((X.shape[0], X.shape[1], n_features))
```
CNN 實際上并不將數據視為具有時間步長,而是將其視為可以執行卷積讀取操作的序列,如一維圖像。
在這個例子中,我們定義了一個帶有 64 個濾波器映射和 2 的內核大小的卷積層。然后是最大池層和密集層來解釋輸入特征。指定輸出層以預測單個數值。
使用隨機梯度下降的有效 [Adam 版本擬合該模型,并使用均方誤差或' _mse_ ',損失函數進行優化。](https://machinelearningmastery.com/adam-optimization-algorithm-for-deep-learning/)
定義模型后,我們可以將其放在訓練數據集上。
```py
# fit model
model.fit(X, y, epochs=1000, verbose=0)
```
在模型擬合后,我們可以使用它來進行預測。
我們可以通過提供輸入來預測序列中的下一個值:
```py
[70, 80, 90]
```
并期望模型預測如下:
```py
[100]
```
該模型期望輸入形狀為[_ 樣本,時間步長,特征 _]三維,因此,我們必須在進行預測之前對單個輸入樣本進行整形。
```py
# demonstrate prediction
x_input = array([70, 80, 90])
x_input = x_input.reshape((1, n_steps, n_features))
yhat = model.predict(x_input, verbose=0)
```
我們可以將所有這些結合在一起并演示如何開發單變量時間序列預測的 1D CNN 模型并進行單一預測。
```py
# univariate cnn example
from numpy import array
from keras.models import Sequential
from keras.layers import Dense
from keras.layers import Flatten
from keras.layers.convolutional import Conv1D
from keras.layers.convolutional import MaxPooling1D
# split a univariate sequence into samples
def split_sequence(sequence, n_steps):
X, y = list(), list()
for i in range(len(sequence)):
# find the end of this pattern
end_ix = i + n_steps
# check if we are beyond the sequence
if end_ix > len(sequence)-1:
break
# gather input and output parts of the pattern
seq_x, seq_y = sequence[i:end_ix], sequence[end_ix]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
raw_seq = [10, 20, 30, 40, 50, 60, 70, 80, 90]
# choose a number of time steps
n_steps = 3
# split into samples
X, y = split_sequence(raw_seq, n_steps)
# reshape from [samples, timesteps] into [samples, timesteps, features]
n_features = 1
X = X.reshape((X.shape[0], X.shape[1], n_features))
# define model
model = Sequential()
model.add(Conv1D(filters=64, kernel_size=2, activation='relu', input_shape=(n_steps, n_features)))
model.add(MaxPooling1D(pool_size=2))
model.add(Flatten())
model.add(Dense(50, activation='relu'))
model.add(Dense(1))
model.compile(optimizer='adam', loss='mse')
# fit model
model.fit(X, y, epochs=1000, verbose=0)
# demonstrate prediction
x_input = array([70, 80, 90])
x_input = x_input.reshape((1, n_steps, n_features))
yhat = model.predict(x_input, verbose=0)
print(yhat)
```
運行該示例準備數據,擬合模型并進行預測。
鑒于算法的隨機性,您的結果可能會有所不同;嘗試運行幾次這個例子。
我們可以看到模型預測序列中的下一個值。
```py
[[101.67965]]
```
## 多變量 CNN 模型
多變量時間序列數據是指每個時間步長有多個觀察值的數據。
對于多變量時間序列數據,我們可能需要兩種主要模型;他們是:
1. 多輸入系列。
2. 多個并聯系列。
讓我們依次看看每一個。
### 多輸入系列
問題可能有兩個或更多并行輸入時間序列和輸出時間序列,這取決于輸入時間序列。
輸入時間序列是平行的,因為每個系列都在同一時間步驟中進行觀察。
我們可以通過兩個并行輸入時間序列的簡單示例來演示這一點,其中輸出序列是輸入序列的簡單添加。
```py
# define input sequence
in_seq1 = array([10, 20, 30, 40, 50, 60, 70, 80, 90])
in_seq2 = array([15, 25, 35, 45, 55, 65, 75, 85, 95])
out_seq = array([in_seq1[i]+in_seq2[i] for i in range(len(in_seq1))])
```
我們可以將這三個數據數組重新整形為單個數據集,其中每一行都是一個時間步,每列是一個單獨的時間序列。
這是將并行時間序列存儲在 CSV 文件中的標準方法。
```py
# convert to [rows, columns] structure
in_seq1 = in_seq1.reshape((len(in_seq1), 1))
in_seq2 = in_seq2.reshape((len(in_seq2), 1))
out_seq = out_seq.reshape((len(out_seq), 1))
# horizontally stack columns
dataset = hstack((in_seq1, in_seq2, out_seq))
```
下面列出了完整的示例。
```py
# multivariate data preparation
from numpy import array
from numpy import hstack
# define input sequence
in_seq1 = array([10, 20, 30, 40, 50, 60, 70, 80, 90])
in_seq2 = array([15, 25, 35, 45, 55, 65, 75, 85, 95])
out_seq = array([in_seq1[i]+in_seq2[i] for i in range(len(in_seq1))])
# convert to [rows, columns] structure
in_seq1 = in_seq1.reshape((len(in_seq1), 1))
in_seq2 = in_seq2.reshape((len(in_seq2), 1))
out_seq = out_seq.reshape((len(out_seq), 1))
# horizontally stack columns
dataset = hstack((in_seq1, in_seq2, out_seq))
print(dataset)
```
運行該示例將打印數據集,每個時間步長為一行,兩個輸入和一個輸出并行時間序列分別為一列。
```py
[[ 10 15 25]
[ 20 25 45]
[ 30 35 65]
[ 40 45 85]
[ 50 55 105]
[ 60 65 125]
[ 70 75 145]
[ 80 85 165]
[ 90 95 185]]
```
與單變量時間序列一樣,我們必須將這些數據組織成具有輸入和輸出樣本的樣本。
1D CNN 模型需要足夠的上下文來學習從輸入序列到輸出值的映射。 CNN 可以支持并行輸入時間序列作為單獨的通道,如圖像的紅色,綠色和藍色分量。因此,我們需要將數據分成樣本,保持兩個輸入序列的觀察順序。
如果我們選擇三個輸入時間步長,那么第一個樣本將如下所示:
輸入:
```py
10, 15
20, 25
30, 35
```
輸出:
```py
65
```
也就是說,每個并行系列的前三個時間步長被提供作為模型的輸入,并且模型將其與第三時間步驟(在這種情況下為 65)的輸出系列中的值相關聯。
我們可以看到,在將時間序列轉換為輸入/輸出樣本以訓練模型時,我們將不得不從輸出時間序列中丟棄一些值,其中我們在先前時間步驟中沒有輸入時間序列中的值。反過來,選擇輸入時間步數的大小將對使用多少訓練數據產生重要影響。
我們可以定義一個名為 _split_sequences()_ 的函數,該函數將采用數據集,因為我們已經為時間步長和行定義了并行序列和返回輸入/輸出樣本的列。
```py
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps
# check if we are beyond the dataset
if end_ix > len(sequences):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :-1], sequences[end_ix-1, -1]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
```
我們可以使用每個輸入時間序列的三個時間步長作為輸入在我們的數據集上測試此函數。
下面列出了完整的示例。
```py
# multivariate data preparation
from numpy import array
from numpy import hstack
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps
# check if we are beyond the dataset
if end_ix > len(sequences):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :-1], sequences[end_ix-1, -1]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
in_seq1 = array([10, 20, 30, 40, 50, 60, 70, 80, 90])
in_seq2 = array([15, 25, 35, 45, 55, 65, 75, 85, 95])
out_seq = array([in_seq1[i]+in_seq2[i] for i in range(len(in_seq1))])
# convert to [rows, columns] structure
in_seq1 = in_seq1.reshape((len(in_seq1), 1))
in_seq2 = in_seq2.reshape((len(in_seq2), 1))
out_seq = out_seq.reshape((len(out_seq), 1))
# horizontally stack columns
dataset = hstack((in_seq1, in_seq2, out_seq))
# choose a number of time steps
n_steps = 3
# convert into input/output
X, y = split_sequences(dataset, n_steps)
print(X.shape, y.shape)
# summarize the data
for i in range(len(X)):
print(X[i], y[i])
```
首先運行該示例打印 _X_ 和 _y_ 組件的形狀。
我們可以看到 _X_ 組件具有三維結構。
第一個維度是樣本數,在本例中為 7.第二個維度是每個樣本的時間步數,在這種情況下為 3,即為函數指定的值。最后,最后一個維度指定并行時間序列的數量或變量的數量,在這種情況下,兩個并行序列為 2。
這是 1D CNN 作為輸入所期望的精確三維結構。數據即可使用而無需進一步重塑。
然后我們可以看到每個樣本的輸入和輸出都被打印出來,顯示了兩個輸入序列中每個樣本的三個時間步長以及每個樣本的相關輸出。
```py
(7, 3, 2) (7,)
[[10 15]
[20 25]
[30 35]] 65
[[20 25]
[30 35]
[40 45]] 85
[[30 35]
[40 45]
[50 55]] 105
[[40 45]
[50 55]
[60 65]] 125
[[50 55]
[60 65]
[70 75]] 145
[[60 65]
[70 75]
[80 85]] 165
[[70 75]
[80 85]
[90 95]] 185
```
我們現在準備在這個數據上安裝一維 CNN 模型,指定每個輸入樣本的預期時間步長和特征數,在這種情況下分別為 3 和 2。
```py
# define model
model = Sequential()
model.add(Conv1D(filters=64, kernel_size=2, activation='relu', input_shape=(n_steps, n_features)))
model.add(MaxPooling1D(pool_size=2))
model.add(Flatten())
model.add(Dense(50, activation='relu'))
model.add(Dense(1))
model.compile(optimizer='adam', loss='mse')
```
在進行預測時,模型需要兩個輸入時間序列的三個時間步長。
我們可以預測輸出系列中的下一個值,提供以下輸入值:
```py
80, 85
90, 95
100, 105
```
具有三個時間步長和兩個變量的一個樣本的形狀必須是[1,3,2]。
我們希望序列中的下一個值為 100 + 105 或 205。
```py
# demonstrate prediction
x_input = array([[80, 85], [90, 95], [100, 105]])
x_input = x_input.reshape((1, n_steps, n_features))
yhat = model.predict(x_input, verbose=0)
```
下面列出了完整的示例。
```py
# multivariate cnn example
from numpy import array
from numpy import hstack
from keras.models import Sequential
from keras.layers import Dense
from keras.layers import Flatten
from keras.layers.convolutional import Conv1D
from keras.layers.convolutional import MaxPooling1D
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps
# check if we are beyond the dataset
if end_ix > len(sequences):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :-1], sequences[end_ix-1, -1]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
in_seq1 = array([10, 20, 30, 40, 50, 60, 70, 80, 90])
in_seq2 = array([15, 25, 35, 45, 55, 65, 75, 85, 95])
out_seq = array([in_seq1[i]+in_seq2[i] for i in range(len(in_seq1))])
# convert to [rows, columns] structure
in_seq1 = in_seq1.reshape((len(in_seq1), 1))
in_seq2 = in_seq2.reshape((len(in_seq2), 1))
out_seq = out_seq.reshape((len(out_seq), 1))
# horizontally stack columns
dataset = hstack((in_seq1, in_seq2, out_seq))
# choose a number of time steps
n_steps = 3
# convert into input/output
X, y = split_sequences(dataset, n_steps)
# the dataset knows the number of features, e.g. 2
n_features = X.shape[2]
# define model
model = Sequential()
model.add(Conv1D(filters=64, kernel_size=2, activation='relu', input_shape=(n_steps, n_features)))
model.add(MaxPooling1D(pool_size=2))
model.add(Flatten())
model.add(Dense(50, activation='relu'))
model.add(Dense(1))
model.compile(optimizer='adam', loss='mse')
# fit model
model.fit(X, y, epochs=1000, verbose=0)
# demonstrate prediction
x_input = array([[80, 85], [90, 95], [100, 105]])
x_input = x_input.reshape((1, n_steps, n_features))
yhat = model.predict(x_input, verbose=0)
print(yhat)
```
運行該示例準備數據,擬合模型并進行預測。
```py
[[206.0161]]
```
還有另一種更精細的方法來模擬問題。
每個輸入序列可以由單獨的 CNN 處理,并且可以在對輸出序列進行預測之前組合這些子模型中的每一個的輸出。
我們可以將其稱為多頭 CNN 模型。根據正在建模的問題的具體情況,它可以提供更大的靈活性或更好的表現。例如,它允許您為每個輸入系列配置不同的子模型,例如過濾器映射的數量和內核大小。
可以使用 [Keras 功能 API](https://machinelearningmastery.com/keras-functional-api-deep-learning/) 在 Keras 中定義此類型的模型。
首先,我們可以將第一個輸入模型定義為 1D CNN,其輸入層需要具有 _n_steps_ 和 1 個特征的向量。
```py
# first input model
visible1 = Input(shape=(n_steps, n_features))
cnn1 = Conv1D(filters=64, kernel_size=2, activation='relu')(visible1)
cnn1 = MaxPooling1D(pool_size=2)(cnn1)
cnn1 = Flatten()(cnn1)
```
我們可以以相同的方式定義第二個輸入子模型。
```py
# second input model
visible2 = Input(shape=(n_steps, n_features))
cnn2 = Conv1D(filters=64, kernel_size=2, activation='relu')(visible2)
cnn2 = MaxPooling1D(pool_size=2)(cnn2)
cnn2 = Flatten()(cnn2)
```
現在已經定義了兩個輸入子模型,我們可以將每個模型的輸出合并為一個長向量,可以在對輸出序列進行預測之前對其進行解釋。
```py
# merge input models
merge = concatenate([cnn1, cnn2])
dense = Dense(50, activation='relu')(merge)
output = Dense(1)(dense)
```
然后我們可以將輸入和輸出聯系在一起。
```py
model = Model(inputs=[visible1, visible2], outputs=output)
```
下圖提供了該模型外觀的示意圖,包括每層輸入和輸出的形狀。
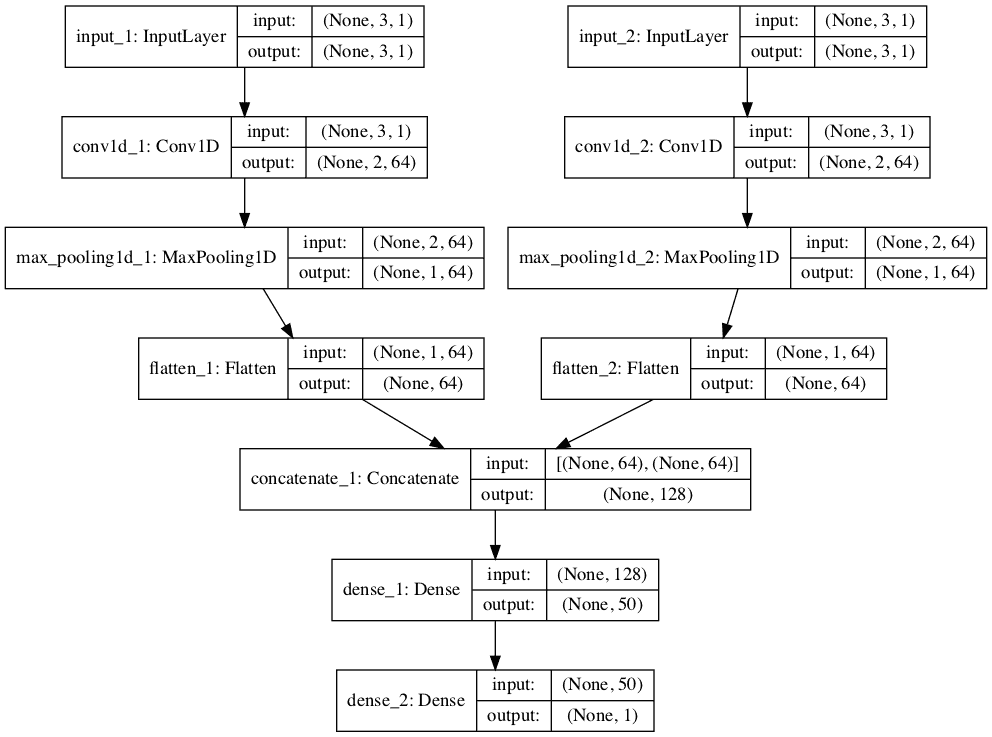
多頭 1D CNN 在多元時間序列預測中的應用
此模型要求輸入作為兩個元素的列表提供,其中列表中的每個元素包含一個子模型的數據。
為了實現這一點,我們可以將 3D 輸入數據分成兩個獨立的輸入數據陣列;這是從一個形狀為[7,3,2]的數組到兩個 3D 數組[7,3,1]
```py
# one time series per head
n_features = 1
# separate input data
X1 = X[:, :, 0].reshape(X.shape[0], X.shape[1], n_features)
X2 = X[:, :, 1].reshape(X.shape[0], X.shape[1], n_features)
```
然后可以提供這些數據以適合模型。
```py
# fit model
model.fit([X1, X2], y, epochs=1000, verbose=0)
```
類似地,我們必須在進行單個一步預測時將單個樣本的數據準備為兩個單獨的二維數組。
```py
x_input = array([[80, 85], [90, 95], [100, 105]])
x1 = x_input[:, 0].reshape((1, n_steps, n_features))
x2 = x_input[:, 1].reshape((1, n_steps, n_features))
```
我們可以將所有這些結合在一起;下面列出了完整的示例。
```py
# multivariate multi-headed 1d cnn example
from numpy import array
from numpy import hstack
from keras.models import Model
from keras.layers import Input
from keras.layers import Dense
from keras.layers import Flatten
from keras.layers.convolutional import Conv1D
from keras.layers.convolutional import MaxPooling1D
from keras.layers.merge import concatenate
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps
# check if we are beyond the dataset
if end_ix > len(sequences):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :-1], sequences[end_ix-1, -1]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
in_seq1 = array([10, 20, 30, 40, 50, 60, 70, 80, 90])
in_seq2 = array([15, 25, 35, 45, 55, 65, 75, 85, 95])
out_seq = array([in_seq1[i]+in_seq2[i] for i in range(len(in_seq1))])
# convert to [rows, columns] structure
in_seq1 = in_seq1.reshape((len(in_seq1), 1))
in_seq2 = in_seq2.reshape((len(in_seq2), 1))
out_seq = out_seq.reshape((len(out_seq), 1))
# horizontally stack columns
dataset = hstack((in_seq1, in_seq2, out_seq))
# choose a number of time steps
n_steps = 3
# convert into input/output
X, y = split_sequences(dataset, n_steps)
# one time series per head
n_features = 1
# separate input data
X1 = X[:, :, 0].reshape(X.shape[0], X.shape[1], n_features)
X2 = X[:, :, 1].reshape(X.shape[0], X.shape[1], n_features)
# first input model
visible1 = Input(shape=(n_steps, n_features))
cnn1 = Conv1D(filters=64, kernel_size=2, activation='relu')(visible1)
cnn1 = MaxPooling1D(pool_size=2)(cnn1)
cnn1 = Flatten()(cnn1)
# second input model
visible2 = Input(shape=(n_steps, n_features))
cnn2 = Conv1D(filters=64, kernel_size=2, activation='relu')(visible2)
cnn2 = MaxPooling1D(pool_size=2)(cnn2)
cnn2 = Flatten()(cnn2)
# merge input models
merge = concatenate([cnn1, cnn2])
dense = Dense(50, activation='relu')(merge)
output = Dense(1)(dense)
model = Model(inputs=[visible1, visible2], outputs=output)
model.compile(optimizer='adam', loss='mse')
# fit model
model.fit([X1, X2], y, epochs=1000, verbose=0)
# demonstrate prediction
x_input = array([[80, 85], [90, 95], [100, 105]])
x1 = x_input[:, 0].reshape((1, n_steps, n_features))
x2 = x_input[:, 1].reshape((1, n_steps, n_features))
yhat = model.predict([x1, x2], verbose=0)
print(yhat)
```
運行該示例準備數據,擬合模型并進行預測。
```py
[[205.871]]
```
### 多個并聯系列
另一個時間序列問題是存在多個并行時間序列并且必須為每個時間序列預測值的情況。
例如,給定上一節的數據:
```py
[[ 10 15 25]
[ 20 25 45]
[ 30 35 65]
[ 40 45 85]
[ 50 55 105]
[ 60 65 125]
[ 70 75 145]
[ 80 85 165]
[ 90 95 185]]
```
我們可能想要預測下一個時間步的三個時間序列中的每一個的值。
這可以稱為多變量預測。
同樣,必須將數據分成輸入/輸出樣本以訓練模型。
該數據集的第一個示例是:
輸入:
```py
10, 15, 25
20, 25, 45
30, 35, 65
```
輸出:
```py
40, 45, 85
```
下面的 _split_sequences()_ 函數將分割多個并行時間序列,其中時間步長為行,每列一個系列為所需的輸入/輸出形狀。
```py
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps
# check if we are beyond the dataset
if end_ix > len(sequences)-1:
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :], sequences[end_ix, :]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
```
我們可以在人為的問題上證明這一點;下面列出了完整的示例。
```py
# multivariate output data prep
from numpy import array
from numpy import hstack
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps
# check if we are beyond the dataset
if end_ix > len(sequences)-1:
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :], sequences[end_ix, :]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
in_seq1 = array([10, 20, 30, 40, 50, 60, 70, 80, 90])
in_seq2 = array([15, 25, 35, 45, 55, 65, 75, 85, 95])
out_seq = array([in_seq1[i]+in_seq2[i] for i in range(len(in_seq1))])
# convert to [rows, columns] structure
in_seq1 = in_seq1.reshape((len(in_seq1), 1))
in_seq2 = in_seq2.reshape((len(in_seq2), 1))
out_seq = out_seq.reshape((len(out_seq), 1))
# horizontally stack columns
dataset = hstack((in_seq1, in_seq2, out_seq))
# choose a number of time steps
n_steps = 3
# convert into input/output
X, y = split_sequences(dataset, n_steps)
print(X.shape, y.shape)
# summarize the data
for i in range(len(X)):
print(X[i], y[i])
```
首先運行該示例打印準備好的 X 和 y 組件的形狀。
X 的形狀是三維的,包括樣品的數量(6),每個樣品選擇的時間步數(3),以及平行時間序列或特征的數量(3)。
y 的形狀是二維的,正如我們可能期望的樣本數量(6)和每個樣本的時間變量數量(3)。
該數據已準備好在 1D CNN 模型中使用,該模型期望每個樣本的 X 和 y 分量具有三維輸入和二維輸出形狀。
然后,打印每個樣本,顯示每個樣本的輸入和輸出分量。
```py
(6, 3, 3) (6, 3)
[[10 15 25]
[20 25 45]
[30 35 65]] [40 45 85]
[[20 25 45]
[30 35 65]
[40 45 85]] [ 50 55 105]
[[ 30 35 65]
[ 40 45 85]
[ 50 55 105]] [ 60 65 125]
[[ 40 45 85]
[ 50 55 105]
[ 60 65 125]] [ 70 75 145]
[[ 50 55 105]
[ 60 65 125]
[ 70 75 145]] [ 80 85 165]
[[ 60 65 125]
[ 70 75 145]
[ 80 85 165]] [ 90 95 185]
```
我們現在準備在這些數據上安裝一維 CNN 模型。
在此模型中,通過 _input_shape_ 參數為輸入層指定時間步數和并行系列(特征)。
并行序列的數量也用于指定輸出層中模型預測的值的數量;再次,這是三個。
```py
# define model
model = Sequential()
model.add(Conv1D(filters=64, kernel_size=2, activation='relu', input_shape=(n_steps, n_features)))
model.add(MaxPooling1D(pool_size=2))
model.add(Flatten())
model.add(Dense(50, activation='relu'))
model.add(Dense(n_features))
model.compile(optimizer='adam', loss='mse')
```
我們可以通過為每個系列提供三個時間步長的輸入來預測三個并行系列中的每一個的下一個值。
```py
70, 75, 145
80, 85, 165
90, 95, 185
```
用于進行單個預測的輸入的形狀必須是 1 個樣本,3 個時間步長和 3 個特征,或者[1,3,3]。
```py
# demonstrate prediction
x_input = array([[70,75,145], [80,85,165], [90,95,185]])
x_input = x_input.reshape((1, n_steps, n_features))
yhat = model.predict(x_input, verbose=0)
```
我們希望向量輸出為:
```py
[100, 105, 205]
```
我們可以將所有這些結合在一起并演示下面的多變量輸出時間序列預測的 1D CNN。
```py
# multivariate output 1d cnn example
from numpy import array
from numpy import hstack
from keras.models import Sequential
from keras.layers import Dense
from keras.layers import Flatten
from keras.layers.convolutional import Conv1D
from keras.layers.convolutional import MaxPooling1D
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps
# check if we are beyond the dataset
if end_ix > len(sequences)-1:
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :], sequences[end_ix, :]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
in_seq1 = array([10, 20, 30, 40, 50, 60, 70, 80, 90])
in_seq2 = array([15, 25, 35, 45, 55, 65, 75, 85, 95])
out_seq = array([in_seq1[i]+in_seq2[i] for i in range(len(in_seq1))])
# convert to [rows, columns] structure
in_seq1 = in_seq1.reshape((len(in_seq1), 1))
in_seq2 = in_seq2.reshape((len(in_seq2), 1))
out_seq = out_seq.reshape((len(out_seq), 1))
# horizontally stack columns
dataset = hstack((in_seq1, in_seq2, out_seq))
# choose a number of time steps
n_steps = 3
# convert into input/output
X, y = split_sequences(dataset, n_steps)
# the dataset knows the number of features, e.g. 2
n_features = X.shape[2]
# define model
model = Sequential()
model.add(Conv1D(filters=64, kernel_size=2, activation='relu', input_shape=(n_steps, n_features)))
model.add(MaxPooling1D(pool_size=2))
model.add(Flatten())
model.add(Dense(50, activation='relu'))
model.add(Dense(n_features))
model.compile(optimizer='adam', loss='mse')
# fit model
model.fit(X, y, epochs=3000, verbose=0)
# demonstrate prediction
x_input = array([[70,75,145], [80,85,165], [90,95,185]])
x_input = x_input.reshape((1, n_steps, n_features))
yhat = model.predict(x_input, verbose=0)
print(yhat)
```
運行該示例準備數據,擬合模型并進行預測。
```py
[[100.11272 105.32213 205.53436]]
```
與多輸入系列一樣,還有另一種更精細的方法來模擬問題。
每個輸出系列可以由單獨的輸出 CNN 模型處理。
我們可以將其稱為多輸出 CNN 模型。根據正在建模的問題的具體情況,它可以提供更大的靈活性或更好的表現。
可以使用 [Keras 功能 API](https://machinelearningmastery.com/keras-functional-api-deep-learning/) 在 Keras 中定義此類型的模型。
首先,我們可以將第一個輸入模型定義為 1D CNN 模型。
```py
# define model
visible = Input(shape=(n_steps, n_features))
cnn = Conv1D(filters=64, kernel_size=2, activation='relu')(visible)
cnn = MaxPooling1D(pool_size=2)(cnn)
cnn = Flatten()(cnn)
cnn = Dense(50, activation='relu')(cnn)
```
然后,我們可以為我們希望預測的三個系列中的每一個定義一個輸出層,其中每個輸出子模型將預測單個時間步長。
```py
# define output 1
output1 = Dense(1)(cnn)
# define output 2
output2 = Dense(1)(cnn)
# define output 3
output3 = Dense(1)(cnn)
```
然后,我們可以將輸入和輸出層組合到一個模型中。
```py
# tie together
model = Model(inputs=visible, outputs=[output1, output2, output3])
model.compile(optimizer='adam', loss='mse')
```
為了使模型架構清晰,下面的示意圖清楚地顯示了模型的三個獨立輸出層以及每個層的輸入和輸出形狀。
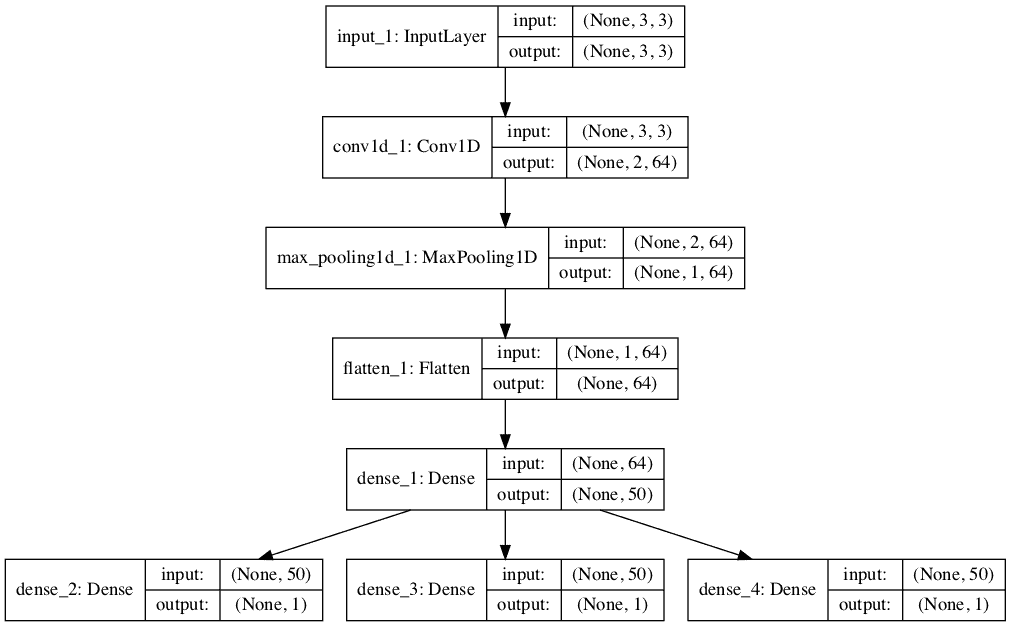
多輸出 1D CNN 用于多元時間序列預測的圖
在訓練模型時,每個樣本需要三個獨立的輸出陣列。我們可以通過將具有形狀[7,3]的輸出訓練數據轉換為具有形狀[7,1]的三個陣列來實現這一點。
```py
# separate output
y1 = y[:, 0].reshape((y.shape[0], 1))
y2 = y[:, 1].reshape((y.shape[0], 1))
y3 = y[:, 2].reshape((y.shape[0], 1))
```
可以在訓練期間將這些陣列提供給模型。
```py
# fit model
model.fit(X, [y1,y2,y3], epochs=2000, verbose=0)
```
將所有這些結合在一起,下面列出了完整的示例。
```py
# multivariate output 1d cnn example
from numpy import array
from numpy import hstack
from keras.models import Model
from keras.layers import Input
from keras.layers import Dense
from keras.layers import Flatten
from keras.layers.convolutional import Conv1D
from keras.layers.convolutional import MaxPooling1D
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps
# check if we are beyond the dataset
if end_ix > len(sequences)-1:
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :], sequences[end_ix, :]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
in_seq1 = array([10, 20, 30, 40, 50, 60, 70, 80, 90])
in_seq2 = array([15, 25, 35, 45, 55, 65, 75, 85, 95])
out_seq = array([in_seq1[i]+in_seq2[i] for i in range(len(in_seq1))])
# convert to [rows, columns] structure
in_seq1 = in_seq1.reshape((len(in_seq1), 1))
in_seq2 = in_seq2.reshape((len(in_seq2), 1))
out_seq = out_seq.reshape((len(out_seq), 1))
# horizontally stack columns
dataset = hstack((in_seq1, in_seq2, out_seq))
# choose a number of time steps
n_steps = 3
# convert into input/output
X, y = split_sequences(dataset, n_steps)
# the dataset knows the number of features, e.g. 2
n_features = X.shape[2]
# separate output
y1 = y[:, 0].reshape((y.shape[0], 1))
y2 = y[:, 1].reshape((y.shape[0], 1))
y3 = y[:, 2].reshape((y.shape[0], 1))
# define model
visible = Input(shape=(n_steps, n_features))
cnn = Conv1D(filters=64, kernel_size=2, activation='relu')(visible)
cnn = MaxPooling1D(pool_size=2)(cnn)
cnn = Flatten()(cnn)
cnn = Dense(50, activation='relu')(cnn)
# define output 1
output1 = Dense(1)(cnn)
# define output 2
output2 = Dense(1)(cnn)
# define output 3
output3 = Dense(1)(cnn)
# tie together
model = Model(inputs=visible, outputs=[output1, output2, output3])
model.compile(optimizer='adam', loss='mse')
# fit model
model.fit(X, [y1,y2,y3], epochs=2000, verbose=0)
# demonstrate prediction
x_input = array([[70,75,145], [80,85,165], [90,95,185]])
x_input = x_input.reshape((1, n_steps, n_features))
yhat = model.predict(x_input, verbose=0)
print(yhat)
```
運行該示例準備數據,擬合模型并進行預測。
```py
[array([[100.96118]], dtype=float32),
array([[105.502686]], dtype=float32),
array([[205.98045]], dtype=float32)]
```
## 多步 CNN 模型
在實踐中,1D CNN 模型在預測表示不同輸出變量的向量輸出(如在前面的示例中)或者表示一個變量的多個時間步長的向量輸出方面幾乎沒有差別。
然而,訓練數據的編制方式存在細微而重要的差異。在本節中,我們將演示使用向量模型開發多步預測模型的情況。
在我們查看模型的細節之前,讓我們首先看一下多步預測的數據準備。
### 數據準備
與一步預測一樣,用于多步時間序列預測的時間序列必須分為帶有輸入和輸出組件的樣本。
輸入和輸出組件都將包含多個時間步長,并且可以具有或不具有相同數量的步驟。
例如,給定單變量時間序列:
```py
[10, 20, 30, 40, 50, 60, 70, 80, 90]
```
我們可以使用最后三個時間步作為輸入并預測接下來的兩個時間步。
第一個樣本如下:
輸入:
```py
[10, 20, 30]
```
輸出:
```py
[40, 50]
```
下面的 _split_sequence()_ 函數實現了這種行為,并將給定的單變量時間序列分割為具有指定數量的輸入和輸出時間步長的樣本。
```py
# split a univariate sequence into samples
def split_sequence(sequence, n_steps_in, n_steps_out):
X, y = list(), list()
for i in range(len(sequence)):
# find the end of this pattern
end_ix = i + n_steps_in
out_end_ix = end_ix + n_steps_out
# check if we are beyond the sequence
if out_end_ix > len(sequence):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequence[i:end_ix], sequence[end_ix:out_end_ix]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
```
我們可以在小型設計數據集上演示此功能。
下面列出了完整的示例。
```py
# multi-step data preparation
from numpy import array
# split a univariate sequence into samples
def split_sequence(sequence, n_steps_in, n_steps_out):
X, y = list(), list()
for i in range(len(sequence)):
# find the end of this pattern
end_ix = i + n_steps_in
out_end_ix = end_ix + n_steps_out
# check if we are beyond the sequence
if out_end_ix > len(sequence):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequence[i:end_ix], sequence[end_ix:out_end_ix]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
raw_seq = [10, 20, 30, 40, 50, 60, 70, 80, 90]
# choose a number of time steps
n_steps_in, n_steps_out = 3, 2
# split into samples
X, y = split_sequence(raw_seq, n_steps_in, n_steps_out)
# summarize the data
for i in range(len(X)):
print(X[i], y[i])
```
運行該示例將單變量系列拆分為輸入和輸出時間步驟,并打印每個系列的輸入和輸出組件。
```py
[10 20 30] [40 50]
[20 30 40] [50 60]
[30 40 50] [60 70]
[40 50 60] [70 80]
[50 60 70] [80 90]
```
既然我們知道如何為多步預測準備數據,那么讓我們看一下可以學習這種映射的一維 CNN 模型。
### 向量輸出模型
1D CNN 可以直接輸出向量,可以解釋為多步預測。
在前一節中看到這種方法是每個輸出時間序列的一個時間步驟被預測為向量。
與前一節中單變量數據的 1D CNN 模型一樣,必須首先對準備好的樣本進行重新整形。 CNN 希望數據具有[_ 樣本,時間步長,特征 _]的三維結構,在這種情況下,我們只有一個特征,因此重塑是直截了當的。
```py
# reshape from [samples, timesteps] into [samples, timesteps, features]
n_features = 1
X = X.reshape((X.shape[0], X.shape[1], n_features))
```
通過 _n_steps_in_ 和 _n_steps_out_ 變量中指定的輸入和輸出步數,我們可以定義一個多步驟時間序列預測模型。
```py
# define model
model = Sequential()
model.add(Conv1D(filters=64, kernel_size=2, activation='relu', input_shape=(n_steps_in, n_features)))
model.add(MaxPooling1D(pool_size=2))
model.add(Flatten())
model.add(Dense(50, activation='relu'))
model.add(Dense(n_steps_out))
model.compile(optimizer='adam', loss='mse')
```
該模型可以對單個樣本進行預測。我們可以通過提供輸入來預測數據集末尾之后的下兩個步驟:
```py
[70, 80, 90]
```
我們希望預測的輸出為:
```py
[100, 110]
```
正如模型所預期的那樣,進行預測時輸入數據的單個樣本的形狀對于 1 個樣本,輸入的 3 個時間步長和單個特征必須是[1,3,1]。
```py
# demonstrate prediction
x_input = array([70, 80, 90])
x_input = x_input.reshape((1, n_steps_in, n_features))
yhat = model.predict(x_input, verbose=0)
```
將所有這些結合在一起,下面列出了具有單變量時間序列的 1D CNN 用于多步預測。
```py
# univariate multi-step vector-output 1d cnn example
from numpy import array
from keras.models import Sequential
from keras.layers import Dense
from keras.layers import Flatten
from keras.layers.convolutional import Conv1D
from keras.layers.convolutional import MaxPooling1D
# split a univariate sequence into samples
def split_sequence(sequence, n_steps_in, n_steps_out):
X, y = list(), list()
for i in range(len(sequence)):
# find the end of this pattern
end_ix = i + n_steps_in
out_end_ix = end_ix + n_steps_out
# check if we are beyond the sequence
if out_end_ix > len(sequence):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequence[i:end_ix], sequence[end_ix:out_end_ix]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
raw_seq = [10, 20, 30, 40, 50, 60, 70, 80, 90]
# choose a number of time steps
n_steps_in, n_steps_out = 3, 2
# split into samples
X, y = split_sequence(raw_seq, n_steps_in, n_steps_out)
# reshape from [samples, timesteps] into [samples, timesteps, features]
n_features = 1
X = X.reshape((X.shape[0], X.shape[1], n_features))
# define model
model = Sequential()
model.add(Conv1D(filters=64, kernel_size=2, activation='relu', input_shape=(n_steps_in, n_features)))
model.add(MaxPooling1D(pool_size=2))
model.add(Flatten())
model.add(Dense(50, activation='relu'))
model.add(Dense(n_steps_out))
model.compile(optimizer='adam', loss='mse')
# fit model
model.fit(X, y, epochs=2000, verbose=0)
# demonstrate prediction
x_input = array([70, 80, 90])
x_input = x_input.reshape((1, n_steps_in, n_features))
yhat = model.predict(x_input, verbose=0)
print(yhat)
```
運行示例預測并打印序列中的后兩個時間步驟。
```py
[[102.86651 115.08979]]
```
## 多變量多步 CNN 模型
在前面的部分中,我們研究了單變量,多變量和多步驟時間序列預測。
對于不同的問題,可以混合和匹配到目前為止呈現的不同類型的 1D CNN 模型。這也適用于涉及多變量和多步預測的時間序列預測問題,但可能更具挑戰性。
在本節中,我們將探討多變量多步驟時間序列預測的數據準備和建模的簡短示例,作為模板來緩解這一挑戰,具體來說:
1. 多輸入多步輸出。
2. 多個并行輸入和多步輸出。
也許最大的絆腳石是準備數據,所以這是我們關注的重點。
### 多輸入多步輸出
存在多變量時間序列預測問題,其中輸出序列是分開的但取決于輸入時間序列,并且輸出序列需要多個時間步長。
例如,考慮前一部分的多變量時間序列:
```py
[[ 10 15 25]
[ 20 25 45]
[ 30 35 65]
[ 40 45 85]
[ 50 55 105]
[ 60 65 125]
[ 70 75 145]
[ 80 85 165]
[ 90 95 185]]
```
我們可以使用兩個輸入時間序列中的每一個的三個先前時間步驟來預測輸出時間序列的兩個時間步長。
輸入:
```py
10, 15
20, 25
30, 35
```
輸出:
```py
65
85
```
下面的 _split_sequences()_ 函數實現了這種行為。
```py
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps_in, n_steps_out):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps_in
out_end_ix = end_ix + n_steps_out-1
# check if we are beyond the dataset
if out_end_ix > len(sequences):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :-1], sequences[end_ix-1:out_end_ix, -1]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
```
我們可以在我們設計的數據集上證明這一點。下面列出了完整的示例。
```py
# multivariate multi-step data preparation
from numpy import array
from numpy import hstack
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps_in, n_steps_out):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps_in
out_end_ix = end_ix + n_steps_out-1
# check if we are beyond the dataset
if out_end_ix > len(sequences):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :-1], sequences[end_ix-1:out_end_ix, -1]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
in_seq1 = array([10, 20, 30, 40, 50, 60, 70, 80, 90])
in_seq2 = array([15, 25, 35, 45, 55, 65, 75, 85, 95])
out_seq = array([in_seq1[i]+in_seq2[i] for i in range(len(in_seq1))])
# convert to [rows, columns] structure
in_seq1 = in_seq1.reshape((len(in_seq1), 1))
in_seq2 = in_seq2.reshape((len(in_seq2), 1))
out_seq = out_seq.reshape((len(out_seq), 1))
# horizontally stack columns
dataset = hstack((in_seq1, in_seq2, out_seq))
# choose a number of time steps
n_steps_in, n_steps_out = 3, 2
# convert into input/output
X, y = split_sequences(dataset, n_steps_in, n_steps_out)
print(X.shape, y.shape)
# summarize the data
for i in range(len(X)):
print(X[i], y[i])
```
首先運行該示例打印準備好的訓練數據的形狀。
我們可以看到樣本的輸入部分的形狀是三維的,由六個樣本組成,具有三個時間步長和兩個輸入時間序列的兩個變量。
樣本的輸出部分對于六個樣本是二維的,并且每個樣本的兩個時間步長是預測的。
然后打印制備的樣品以確認數據是按照我們指定的方式制備的。
```py
(6, 3, 2) (6, 2)
[[10 15]
[20 25]
[30 35]] [65 85]
[[20 25]
[30 35]
[40 45]] [ 85 105]
[[30 35]
[40 45]
[50 55]] [105 125]
[[40 45]
[50 55]
[60 65]] [125 145]
[[50 55]
[60 65]
[70 75]] [145 165]
[[60 65]
[70 75]
[80 85]] [165 185]
```
我們現在可以開發用于多步預測的 1D CNN 模型。
在這種情況下,我們將演示向量輸出模型。下面列出了完整的示例。
```py
# multivariate multi-step 1d cnn example
from numpy import array
from numpy import hstack
from keras.models import Sequential
from keras.layers import Dense
from keras.layers import Flatten
from keras.layers.convolutional import Conv1D
from keras.layers.convolutional import MaxPooling1D
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps_in, n_steps_out):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps_in
out_end_ix = end_ix + n_steps_out-1
# check if we are beyond the dataset
if out_end_ix > len(sequences):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :-1], sequences[end_ix-1:out_end_ix, -1]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
in_seq1 = array([10, 20, 30, 40, 50, 60, 70, 80, 90])
in_seq2 = array([15, 25, 35, 45, 55, 65, 75, 85, 95])
out_seq = array([in_seq1[i]+in_seq2[i] for i in range(len(in_seq1))])
# convert to [rows, columns] structure
in_seq1 = in_seq1.reshape((len(in_seq1), 1))
in_seq2 = in_seq2.reshape((len(in_seq2), 1))
out_seq = out_seq.reshape((len(out_seq), 1))
# horizontally stack columns
dataset = hstack((in_seq1, in_seq2, out_seq))
# choose a number of time steps
n_steps_in, n_steps_out = 3, 2
# convert into input/output
X, y = split_sequences(dataset, n_steps_in, n_steps_out)
# the dataset knows the number of features, e.g. 2
n_features = X.shape[2]
# define model
model = Sequential()
model.add(Conv1D(filters=64, kernel_size=2, activation='relu', input_shape=(n_steps_in, n_features)))
model.add(MaxPooling1D(pool_size=2))
model.add(Flatten())
model.add(Dense(50, activation='relu'))
model.add(Dense(n_steps_out))
model.compile(optimizer='adam', loss='mse')
# fit model
model.fit(X, y, epochs=2000, verbose=0)
# demonstrate prediction
x_input = array([[70, 75], [80, 85], [90, 95]])
x_input = x_input.reshape((1, n_steps_in, n_features))
yhat = model.predict(x_input, verbose=0)
print(yhat)
```
運行該示例適合模型并預測輸出序列的下兩個時間步驟超出數據集。
我們希望接下來的兩個步驟是[185,205]。
這是一個具有挑戰性的問題框架,數據非常少,模型的任意配置版本也很接近。
```py
[[185.57011 207.77893]]
```
### 多個并行輸入和多步輸出
并行時間序列的問題可能需要預測每個時間序列的多個時間步長。
例如,考慮前一部分的多變量時間序列:
```py
[[ 10 15 25]
[ 20 25 45]
[ 30 35 65]
[ 40 45 85]
[ 50 55 105]
[ 60 65 125]
[ 70 75 145]
[ 80 85 165]
[ 90 95 185]]
```
我們可以使用三個時間序列中的每一個的最后三個步驟作為模型的輸入,并預測三個時間序列中的每一個的下一個時間步長作為輸出。
訓練數據集中的第一個樣本如下。
輸入:
```py
10, 15, 25
20, 25, 45
30, 35, 65
```
輸出:
```py
40, 45, 85
50, 55, 105
```
下面的 _split_sequences()_ 函數實現了這種行為。
```py
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps_in, n_steps_out):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps_in
out_end_ix = end_ix + n_steps_out
# check if we are beyond the dataset
if out_end_ix > len(sequences):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :], sequences[end_ix:out_end_ix, :]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
```
我們可以在小型設計數據集上演示此功能。
下面列出了完整的示例。
```py
# multivariate multi-step data preparation
from numpy import array
from numpy import hstack
from keras.models import Sequential
from keras.layers import LSTM
from keras.layers import Dense
from keras.layers import RepeatVector
from keras.layers import TimeDistributed
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps_in, n_steps_out):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps_in
out_end_ix = end_ix + n_steps_out
# check if we are beyond the dataset
if out_end_ix > len(sequences):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :], sequences[end_ix:out_end_ix, :]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
in_seq1 = array([10, 20, 30, 40, 50, 60, 70, 80, 90])
in_seq2 = array([15, 25, 35, 45, 55, 65, 75, 85, 95])
out_seq = array([in_seq1[i]+in_seq2[i] for i in range(len(in_seq1))])
# convert to [rows, columns] structure
in_seq1 = in_seq1.reshape((len(in_seq1), 1))
in_seq2 = in_seq2.reshape((len(in_seq2), 1))
out_seq = out_seq.reshape((len(out_seq), 1))
# horizontally stack columns
dataset = hstack((in_seq1, in_seq2, out_seq))
# choose a number of time steps
n_steps_in, n_steps_out = 3, 2
# convert into input/output
X, y = split_sequences(dataset, n_steps_in, n_steps_out)
print(X.shape, y.shape)
# summarize the data
for i in range(len(X)):
print(X[i], y[i])
```
首先運行該示例打印準備好的訓練數據集的形狀。
我們可以看到數據集的輸入( _X_ )和輸出( _Y_ )元素分別對于樣本數,時間步長和變量或并行時間序列是三維的。 。
然后將每個系列的輸入和輸出元素并排打印,以便我們可以確認數據是按照我們的預期準備的。
```py
(5, 3, 3) (5, 2, 3)
[[10 15 25]
[20 25 45]
[30 35 65]] [[ 40 45 85]
[ 50 55 105]]
[[20 25 45]
[30 35 65]
[40 45 85]] [[ 50 55 105]
[ 60 65 125]]
[[ 30 35 65]
[ 40 45 85]
[ 50 55 105]] [[ 60 65 125]
[ 70 75 145]]
[[ 40 45 85]
[ 50 55 105]
[ 60 65 125]] [[ 70 75 145]
[ 80 85 165]]
[[ 50 55 105]
[ 60 65 125]
[ 70 75 145]] [[ 80 85 165]
[ 90 95 185]]
```
我們現在可以為此數據集開發一維 CNN 模型。
在這種情況下,我們將使用向量輸出模型。因此,我們必須展平每個樣本的輸出部分的三維結構,以便訓練模型。這意味著,不是為每個系列預測兩個步驟,而是對模型進行訓練并預期直接預測六個數字的向量。
```py
# flatten output
n_output = y.shape[1] * y.shape[2]
y = y.reshape((y.shape[0], n_output))
```
下面列出了完整的示例。
```py
# multivariate output multi-step 1d cnn example
from numpy import array
from numpy import hstack
from keras.models import Sequential
from keras.layers import Dense
from keras.layers import Flatten
from keras.layers.convolutional import Conv1D
from keras.layers.convolutional import MaxPooling1D
# split a multivariate sequence into samples
def split_sequences(sequences, n_steps_in, n_steps_out):
X, y = list(), list()
for i in range(len(sequences)):
# find the end of this pattern
end_ix = i + n_steps_in
out_end_ix = end_ix + n_steps_out
# check if we are beyond the dataset
if out_end_ix > len(sequences):
break
# gather input and output parts of the pattern
seq_x, seq_y = sequences[i:end_ix, :], sequences[end_ix:out_end_ix, :]
X.append(seq_x)
y.append(seq_y)
return array(X), array(y)
# define input sequence
in_seq1 = array([10, 20, 30, 40, 50, 60, 70, 80, 90])
in_seq2 = array([15, 25, 35, 45, 55, 65, 75, 85, 95])
out_seq = array([in_seq1[i]+in_seq2[i] for i in range(len(in_seq1))])
# convert to [rows, columns] structure
in_seq1 = in_seq1.reshape((len(in_seq1), 1))
in_seq2 = in_seq2.reshape((len(in_seq2), 1))
out_seq = out_seq.reshape((len(out_seq), 1))
# horizontally stack columns
dataset = hstack((in_seq1, in_seq2, out_seq))
# choose a number of time steps
n_steps_in, n_steps_out = 3, 2
# convert into input/output
X, y = split_sequences(dataset, n_steps_in, n_steps_out)
# flatten output
n_output = y.shape[1] * y.shape[2]
y = y.reshape((y.shape[0], n_output))
# the dataset knows the number of features, e.g. 2
n_features = X.shape[2]
# define model
model = Sequential()
model.add(Conv1D(filters=64, kernel_size=2, activation='relu', input_shape=(n_steps_in, n_features)))
model.add(MaxPooling1D(pool_size=2))
model.add(Flatten())
model.add(Dense(50, activation='relu'))
model.add(Dense(n_output))
model.compile(optimizer='adam', loss='mse')
# fit model
model.fit(X, y, epochs=7000, verbose=0)
# demonstrate prediction
x_input = array([[60, 65, 125], [70, 75, 145], [80, 85, 165]])
x_input = x_input.reshape((1, n_steps_in, n_features))
yhat = model.predict(x_input, verbose=0)
print(yhat)
```
運行該示例適合模型并預測超出數據集末尾的下兩個時間步的三個時間步中的每一個的值。
我們希望這些系列和時間步驟的值如下:
```py
90, 95, 185
100, 105, 205
```
我們可以看到模型預測合理地接近預期值。
```py
[[ 90.47855 95.621284 186.02629 100.48118 105.80815 206.52821 ]]
```
## 摘要
在本教程中,您了解了如何針對一系列標準時間序列預測問題開發一套 CNN 模型。
具體來說,你學到了:
* 如何開發 CNN 模型進行單變量時間序列預測。
* 如何開發 CNN 模型進行多元時間序列預測。
* 如何開發 CNN 模型進行多步時間序列預測。
你有任何問題嗎?
在下面的評論中提出您的問題,我會盡力回答。
- Machine Learning Mastery 應用機器學習教程
- 5競爭機器學習的好處
- 過度擬合的簡單直覺,或者為什么測試訓練數據是一個壞主意
- 特征選擇簡介
- 應用機器學習作為一個搜索問題的溫和介紹
- 為什么應用機器學習很難
- 為什么我的結果不如我想的那么好?你可能過度擬合了
- 用ROC曲線評估和比較分類器表現
- BigML評論:發現本機學習即服務平臺的聰明功能
- BigML教程:開發您的第一個決策樹并進行預測
- 構建生產機器學習基礎設施
- 分類準確性不夠:可以使用更多表現測量
- 一種預測模型的巧妙應用
- 機器學習項目中常見的陷阱
- 數據清理:將凌亂的數據轉換為整潔的數據
- 機器學習中的數據泄漏
- 數據,學習和建模
- 數據管理至關重要以及為什么需要認真對待它
- 將預測模型部署到生產中
- 參數和超參數之間有什么區別?
- 測試和驗證數據集之間有什么區別?
- 發現特征工程,如何設計特征以及如何獲得它
- 如何開始使用Kaggle
- 超越預測
- 如何在評估機器學習算法時選擇正確的測試選項
- 如何定義機器學習問題
- 如何評估機器學習算法
- 如何獲得基線結果及其重要性
- 如何充分利用機器學習數據
- 如何識別數據中的異常值
- 如何提高機器學習效果
- 如何在競爭機器學習中踢屁股
- 如何知道您的機器學習模型是否具有良好的表現
- 如何布局和管理您的機器學習項目
- 如何為機器學習準備數據
- 如何減少最終機器學習模型中的方差
- 如何使用機器學習結果
- 如何解決像數據科學家這樣的問題
- 通過數據預處理提高模型精度
- 處理機器學習的大數據文件的7種方法
- 建立機器學習系統的經驗教訓
- 如何使用機器學習清單可靠地獲得準確的預測(即使您是初學者)
- 機器學習模型運行期間要做什么
- 機器學習表現改進備忘單
- 來自世界級從業者的機器學習技巧:Phil Brierley
- 模型預測精度與機器學習中的解釋
- 競爭機器學習的模型選擇技巧
- 機器學習需要多少訓練數據?
- 如何系統地規劃和運行機器學習實驗
- 應用機器學習過程
- 默認情況下可重現的機器學習結果
- 10個實踐應用機器學習的標準數據集
- 簡單的三步法到最佳機器學習算法
- 打擊機器學習數據集中不平衡類的8種策略
- 模型表現不匹配問題(以及如何處理)
- 黑箱機器學習的誘惑陷阱
- 如何培養最終的機器學習模型
- 使用探索性數據分析了解您的問題并獲得更好的結果
- 什么是數據挖掘和KDD
- 為什么One-Hot在機器學習中編碼數據?
- 為什么你應該在你的機器學習問題上進行抽樣檢查算法
- 所以,你正在研究機器學習問題......
- Machine Learning Mastery Keras 深度學習教程
- Keras 中神經網絡模型的 5 步生命周期
- 在 Python 迷你課程中應用深度學習
- Keras 深度學習庫的二元分類教程
- 如何用 Keras 構建多層感知器神經網絡模型
- 如何在 Keras 中檢查深度學習模型
- 10 個用于 Amazon Web Services 深度學習的命令行秘籍
- 機器學習卷積神經網絡的速成課程
- 如何在 Python 中使用 Keras 進行深度學習的度量
- 深度學習書籍
- 深度學習課程
- 你所知道的深度學習是一種謊言
- 如何設置 Amazon AWS EC2 GPU 以訓練 Keras 深度學習模型(分步)
- 神經網絡中批量和迭代之間的區別是什么?
- 在 Keras 展示深度學習模型訓練歷史
- 基于 Keras 的深度學習模型中的dropout正則化
- 評估 Keras 中深度學習模型的表現
- 如何評價深度學習模型的技巧
- 小批量梯度下降的簡要介紹以及如何配置批量大小
- 在 Keras 中獲得深度學習幫助的 9 種方法
- 如何使用 Keras 在 Python 中網格搜索深度學習模型的超參數
- 用 Keras 在 Python 中使用卷積神經網絡進行手寫數字識別
- 如何用 Keras 進行預測
- 用 Keras 進行深度學習的圖像增強
- 8 個深度學習的鼓舞人心的應用
- Python 深度學習庫 Keras 簡介
- Python 深度學習庫 TensorFlow 簡介
- Python 深度學習庫 Theano 簡介
- 如何使用 Keras 函數式 API 進行深度學習
- Keras 深度學習庫的多類分類教程
- 多層感知器神經網絡速成課程
- 基于卷積神經網絡的 Keras 深度學習庫中的目標識別
- 流行的深度學習庫
- 用深度學習預測電影評論的情感
- Python 中的 Keras 深度學習庫的回歸教程
- 如何使用 Keras 獲得可重現的結果
- 如何在 Linux 服務器上運行深度學習實驗
- 保存并加載您的 Keras 深度學習模型
- 用 Keras 逐步開發 Python 中的第一個神經網絡
- 用 Keras 理解 Python 中的有狀態 LSTM 循環神經網絡
- 在 Python 中使用 Keras 深度學習模型和 Scikit-Learn
- 如何使用預訓練的 VGG 模型對照片中的物體進行分類
- 在 Python 和 Keras 中對深度學習模型使用學習率調度
- 如何在 Keras 中可視化深度學習神經網絡模型
- 什么是深度學習?
- 何時使用 MLP,CNN 和 RNN 神經網絡
- 為什么用隨機權重初始化神經網絡?
- Machine Learning Mastery 深度學習 NLP 教程
- 深度學習在自然語言處理中的 7 個應用
- 如何實現自然語言處理的波束搜索解碼器
- 深度學習文檔分類的最佳實踐
- 關于自然語言處理的熱門書籍
- 在 Python 中計算文本 BLEU 分數的溫和介紹
- 使用編碼器 - 解碼器模型的用于字幕生成的注入和合并架構
- 如何用 Python 清理機器學習的文本
- 如何配置神經機器翻譯的編碼器 - 解碼器模型
- 如何開始深度學習自然語言處理(7 天迷你課程)
- 自然語言處理的數據集
- 如何開發一種深度學習的詞袋模型來預測電影評論情感
- 深度學習字幕生成模型的溫和介紹
- 如何在 Keras 中定義神經機器翻譯的編碼器 - 解碼器序列 - 序列模型
- 如何利用小實驗在 Keras 中開發字幕生成模型
- 如何從頭開發深度學習圖片標題生成器
- 如何在 Keras 中開發基于字符的神經語言模型
- 如何開發用于情感分析的 N-gram 多通道卷積神經網絡
- 如何從零開始開發神經機器翻譯系統
- 如何在 Python 中用 Keras 開發基于單詞的神經語言模型
- 如何開發一種預測電影評論情感的詞嵌入模型
- 如何使用 Gensim 在 Python 中開發詞嵌入
- 用于文本摘要的編碼器 - 解碼器深度學習模型
- Keras 中文本摘要的編碼器 - 解碼器模型
- 用于神經機器翻譯的編碼器 - 解碼器循環神經網絡模型
- 淺談詞袋模型
- 文本摘要的溫和介紹
- 編碼器 - 解碼器循環神經網絡中的注意力如何工作
- 如何利用深度學習自動生成照片的文本描述
- 如何開發一個單詞級神經語言模型并用它來生成文本
- 淺談神經機器翻譯
- 什么是自然語言處理?
- 牛津自然語言處理深度學習課程
- 如何為機器翻譯準備法語到英語的數據集
- 如何為情感分析準備電影評論數據
- 如何為文本摘要準備新聞文章
- 如何準備照片標題數據集以訓練深度學習模型
- 如何使用 Keras 為深度學習準備文本數據
- 如何使用 scikit-learn 為機器學習準備文本數據
- 自然語言處理神經網絡模型入門
- 對自然語言處理的深度學習的承諾
- 在 Python 中用 Keras 進行 LSTM 循環神經網絡的序列分類
- 斯坦福自然語言處理深度學習課程評價
- 統計語言建模和神經語言模型的簡要介紹
- 使用 Keras 在 Python 中進行 LSTM 循環神經網絡的文本生成
- 淺談機器學習中的轉換
- 如何使用 Keras 將詞嵌入層用于深度學習
- 什么是用于文本的詞嵌入
- Machine Learning Mastery 深度學習時間序列教程
- 如何開發人類活動識別的一維卷積神經網絡模型
- 人類活動識別的深度學習模型
- 如何評估人類活動識別的機器學習算法
- 時間序列預測的多層感知器網絡探索性配置
- 比較經典和機器學習方法進行時間序列預測的結果
- 如何通過深度學習快速獲得時間序列預測的結果
- 如何利用 Python 處理序列預測問題中的缺失時間步長
- 如何建立預測大氣污染日的概率預測模型
- 如何開發一種熟練的機器學習時間序列預測模型
- 如何構建家庭用電自回歸預測模型
- 如何開發多步空氣污染時間序列預測的自回歸預測模型
- 如何制定多站點多元空氣污染時間序列預測的基線預測
- 如何開發時間序列預測的卷積神經網絡模型
- 如何開發卷積神經網絡用于多步時間序列預測
- 如何開發單變量時間序列預測的深度學習模型
- 如何開發 LSTM 模型用于家庭用電的多步時間序列預測
- 如何開發 LSTM 模型進行時間序列預測
- 如何開發多元多步空氣污染時間序列預測的機器學習模型
- 如何開發多層感知器模型進行時間序列預測
- 如何開發人類活動識別時間序列分類的 RNN 模型
- 如何開始深度學習的時間序列預測(7 天迷你課程)
- 如何網格搜索深度學習模型進行時間序列預測
- 如何對單變量時間序列預測的網格搜索樸素方法
- 如何在 Python 中搜索 SARIMA 模型超參數用于時間序列預測
- 如何在 Python 中進行時間序列預測的網格搜索三次指數平滑
- 一個標準的人類活動識別問題的溫和介紹
- 如何加載和探索家庭用電數據
- 如何加載,可視化和探索復雜的多變量多步時間序列預測數據集
- 如何從智能手機數據模擬人類活動
- 如何根據環境因素預測房間占用率
- 如何使用腦波預測人眼是開放還是閉合
- 如何在 Python 中擴展長短期內存網絡的數據
- 如何使用 TimeseriesGenerator 進行 Keras 中的時間序列預測
- 基于機器學習算法的室內運動時間序列分類
- 用于時間序列預測的狀態 LSTM 在線學習的不穩定性
- 用于罕見事件時間序列預測的 LSTM 模型體系結構
- 用于時間序列預測的 4 種通用機器學習數據變換
- Python 中長短期記憶網絡的多步時間序列預測
- 家庭用電機器學習的多步時間序列預測
- Keras 中 LSTM 的多變量時間序列預測
- 如何開發和評估樸素的家庭用電量預測方法
- 如何為長短期記憶網絡準備單變量時間序列數據
- 循環神經網絡在時間序列預測中的應用
- 如何在 Python 中使用差異變換刪除趨勢和季節性
- 如何在 LSTM 中種子狀態用于 Python 中的時間序列預測
- 使用 Python 進行時間序列預測的有狀態和無狀態 LSTM
- 長短時記憶網絡在時間序列預測中的適用性
- 時間序列預測問題的分類
- Python 中長短期記憶網絡的時間序列預測
- 基于 Keras 的 Python 中 LSTM 循環神經網絡的時間序列預測
- Keras 中深度學習的時間序列預測
- 如何用 Keras 調整 LSTM 超參數進行時間序列預測
- 如何在時間序列預測訓練期間更新 LSTM 網絡
- 如何使用 LSTM 網絡的 Dropout 進行時間序列預測
- 如何使用 LSTM 網絡中的特征進行時間序列預測
- 如何在 LSTM 網絡中使用時間序列進行時間序列預測
- 如何利用 LSTM 網絡進行權重正則化進行時間序列預測
- Machine Learning Mastery 線性代數教程
- 機器學習數學符號的基礎知識
- 用 NumPy 陣列輕松介紹廣播
- 如何從 Python 中的 Scratch 計算主成分分析(PCA)
- 用于編碼器審查的計算線性代數
- 10 機器學習中的線性代數示例
- 線性代數的溫和介紹
- 用 NumPy 輕松介紹 Python 中的 N 維數組
- 機器學習向量的溫和介紹
- 如何在 Python 中為機器學習索引,切片和重塑 NumPy 數組
- 機器學習的矩陣和矩陣算法簡介
- 溫和地介紹機器學習的特征分解,特征值和特征向量
- NumPy 對預期價值,方差和協方差的簡要介紹
- 機器學習矩陣分解的溫和介紹
- 用 NumPy 輕松介紹機器學習的張量
- 用于機器學習的線性代數中的矩陣類型簡介
- 用于機器學習的線性代數備忘單
- 線性代數的深度學習
- 用于機器學習的線性代數(7 天迷你課程)
- 機器學習的線性代數
- 機器學習矩陣運算的溫和介紹
- 線性代數評論沒有廢話指南
- 學習機器學習線性代數的主要資源
- 淺談機器學習的奇異值分解
- 如何用線性代數求解線性回歸
- 用于機器學習的稀疏矩陣的溫和介紹
- 機器學習中向量規范的溫和介紹
- 學習線性代數用于機器學習的 5 個理由
- Machine Learning Mastery LSTM 教程
- Keras中長短期記憶模型的5步生命周期
- 長短時記憶循環神經網絡的注意事項
- CNN長短期記憶網絡
- 逆向神經網絡中的深度學習速成課程
- 可變長度輸入序列的數據準備
- 如何用Keras開發用于Python序列分類的雙向LSTM
- 如何開發Keras序列到序列預測的編碼器 - 解碼器模型
- 如何診斷LSTM模型的過度擬合和欠擬合
- 如何開發一種編碼器 - 解碼器模型,注重Keras中的序列到序列預測
- 編碼器 - 解碼器長短期存儲器網絡
- 神經網絡中爆炸梯度的溫和介紹
- 對時間反向傳播的溫和介紹
- 生成長短期記憶網絡的溫和介紹
- 專家對長短期記憶網絡的簡要介紹
- 在序列預測問題上充分利用LSTM
- 編輯器 - 解碼器循環神經網絡全局注意的溫和介紹
- 如何利用長短時記憶循環神經網絡處理很長的序列
- 如何在Python中對一個熱編碼序列數據
- 如何使用編碼器 - 解碼器LSTM來回顯隨機整數序列
- 具有注意力的編碼器 - 解碼器RNN體系結構的實現模式
- 學習使用編碼器解碼器LSTM循環神經網絡添加數字
- 如何學習長短時記憶循環神經網絡回聲隨機整數
- 具有Keras的長短期記憶循環神經網絡的迷你課程
- LSTM自動編碼器的溫和介紹
- 如何用Keras中的長短期記憶模型進行預測
- 用Python中的長短期內存網絡演示內存
- 基于循環神經網絡的序列預測模型的簡要介紹
- 深度學習的循環神經網絡算法之旅
- 如何重塑Keras中長短期存儲網絡的輸入數據
- 了解Keras中LSTM的返回序列和返回狀態之間的差異
- RNN展開的溫和介紹
- 5學習LSTM循環神經網絡的簡單序列預測問題的例子
- 使用序列進行預測
- 堆疊長短期內存網絡
- 什么是教師強制循環神經網絡?
- 如何在Python中使用TimeDistributed Layer for Long Short-Term Memory Networks
- 如何準備Keras中截斷反向傳播的序列預測
- 如何在使用LSTM進行訓練和預測時使用不同的批量大小
- Machine Learning Mastery 機器學習算法教程
- 機器學習算法之旅
- 用于機器學習的裝袋和隨機森林集合算法
- 從頭開始實施機器學習算法的好處
- 更好的樸素貝葉斯:從樸素貝葉斯算法中獲取最多的12個技巧
- 機器學習的提升和AdaBoost
- 選擇機器學習算法:Microsoft Azure的經驗教訓
- 機器學習的分類和回歸樹
- 什么是機器學習中的混淆矩陣
- 如何使用Python從頭開始創建算法測試工具
- 通過創建機器學習算法的目標列表來控制
- 從頭開始停止編碼機器學習算法
- 在實現機器學習算法時,不要從開源代碼開始
- 不要使用隨機猜測作為基線分類器
- 淺談機器學習中的概念漂移
- 溫和介紹機器學習中的偏差 - 方差權衡
- 機器學習的梯度下降
- 機器學習算法如何工作(他們學習輸入到輸出的映射)
- 如何建立機器學習算法的直覺
- 如何實現機器學習算法
- 如何研究機器學習算法行為
- 如何學習機器學習算法
- 如何研究機器學習算法
- 如何研究機器學習算法
- 如何在Python中從頭開始實現反向傳播算法
- 如何用Python從頭開始實現Bagging
- 如何用Python從頭開始實現基線機器學習算法
- 如何在Python中從頭開始實現決策樹算法
- 如何用Python從頭開始實現學習向量量化
- 如何利用Python從頭開始隨機梯度下降實現線性回歸
- 如何利用Python從頭開始隨機梯度下降實現Logistic回歸
- 如何用Python從頭開始實現機器學習算法表現指標
- 如何在Python中從頭開始實現感知器算法
- 如何在Python中從零開始實現隨機森林
- 如何在Python中從頭開始實現重采樣方法
- 如何用Python從頭開始實現簡單線性回歸
- 如何用Python從頭開始實現堆棧泛化(Stacking)
- K-Nearest Neighbors for Machine Learning
- 學習機器學習的向量量化
- 機器學習的線性判別分析
- 機器學習的線性回歸
- 使用梯度下降進行機器學習的線性回歸教程
- 如何在Python中從頭開始加載機器學習數據
- 機器學習的Logistic回歸
- 機器學習的Logistic回歸教程
- 機器學習算法迷你課程
- 如何在Python中從頭開始實現樸素貝葉斯
- 樸素貝葉斯機器學習
- 樸素貝葉斯機器學習教程
- 機器學習算法的過擬合和欠擬合
- 參數化和非參數機器學習算法
- 理解任何機器學習算法的6個問題
- 在機器學習中擁抱隨機性
- 如何使用Python從頭開始擴展機器學習數據
- 機器學習的簡單線性回歸教程
- 有監督和無監督的機器學習算法
- 用于機器學習的支持向量機
- 在沒有數學背景的情況下理解機器學習算法的5種技術
- 最好的機器學習算法
- 教程從頭開始在Python中實現k-Nearest Neighbors
- 通過從零開始實現它們來理解機器學習算法(以及繞過壞代碼的策略)
- 使用隨機森林:在121個數據集上測試179個分類器
- 為什么從零開始實現機器學習算法
- Machine Learning Mastery 機器學習入門教程
- 機器學習入門的四個步驟:初學者入門與實踐的自上而下策略
- 你應該培養的 5 個機器學習領域
- 一種選擇機器學習算法的數據驅動方法
- 機器學習中的分析與數值解
- 應用機器學習是一種精英政治
- 機器學習的基本概念
- 如何成為數據科學家
- 初學者如何在機器學習中弄錯
- 機器學習的最佳編程語言
- 構建機器學習組合
- 機器學習中分類與回歸的區別
- 評估自己作為數據科學家并利用結果建立驚人的數據科學團隊
- 探索 Kaggle 大師的方法論和心態:對 Diogo Ferreira 的采訪
- 擴展機器學習工具并展示掌握
- 通過尋找地標開始機器學習
- 溫和地介紹預測建模
- 通過提供結果在機器學習中獲得夢想的工作
- 如何開始機器學習:自學藍圖
- 開始并在機器學習方面取得進展
- 應用機器學習的 Hello World
- 初學者如何使用小型項目開始機器學習并在 Kaggle 上進行競爭
- 我如何開始機器學習? (簡短版)
- 我是如何開始機器學習的
- 如何在機器學習中取得更好的成績
- 如何從在銀行工作到擔任 Target 的高級數據科學家
- 如何學習任何機器學習工具
- 使用小型目標項目深入了解機器學習工具
- 獲得付費申請機器學習
- 映射機器學習工具的景觀
- 機器學習開發環境
- 機器學習金錢
- 程序員的機器學習
- 機器學習很有意思
- 機器學習是 Kaggle 比賽
- 機器學習現在很受歡迎
- 機器學習掌握方法
- 機器學習很重要
- 機器學習 Q& A:概念漂移,更好的結果和學習更快
- 缺乏自學機器學習的路線圖
- 機器學習很重要
- 快速了解任何機器學習工具(即使您是初學者)
- 機器學習工具
- 找到你的機器學習部落
- 機器學習在一年
- 通過競爭一致的大師 Kaggle
- 5 程序員在機器學習中開始犯錯誤
- 哲學畢業生到機器學習從業者(Brian Thomas 采訪)
- 機器學習入門的實用建議
- 實用機器學習問題
- 使用來自 UCI 機器學習庫的數據集練習機器學習
- 使用秘籍的任何機器學習工具快速啟動
- 程序員可以進入機器學習
- 程序員應該進入機器學習
- 項目焦點:Shashank Singh 的人臉識別
- 項目焦點:使用 Mahout 和 Konstantin Slisenko 進行堆棧交換群集
- 機器學習自學指南
- 4 個自學機器學習項目
- álvaroLemos 如何在數據科學團隊中獲得機器學習實習
- 如何思考機器學習
- 現實世界機器學習問題之旅
- 有關機器學習的有用知識
- 如果我沒有學位怎么辦?
- 如果我不是一個優秀的程序員怎么辦?
- 如果我不擅長數學怎么辦?
- 為什么機器學習算法會處理以前從未見過的數據?
- 是什么阻礙了你的機器學習目標?
- 什么是機器學習?
- 機器學習適合哪里?
- 為什么要進入機器學習?
- 研究對您來說很重要的機器學習問題
- 你這樣做是錯的。為什么機器學習不必如此困難
- Machine Learning Mastery Sklearn 教程
- Scikit-Learn 的溫和介紹:Python 機器學習庫
- 使用 Python 管道和 scikit-learn 自動化機器學習工作流程
- 如何以及何時使用帶有 scikit-learn 的校準分類模型
- 如何比較 Python 中的機器學習算法與 scikit-learn
- 用于機器學習開發人員的 Python 崩潰課程
- 用 scikit-learn 在 Python 中集成機器學習算法
- 使用重采樣評估 Python 中機器學習算法的表現
- 使用 Scikit-Learn 在 Python 中進行特征選擇
- Python 中機器學習的特征選擇
- 如何使用 scikit-learn 在 Python 中生成測試數據集
- scikit-learn 中的機器學習算法秘籍
- 如何使用 Python 處理丟失的數據
- 如何開始使用 Python 進行機器學習
- 如何使用 Scikit-Learn 在 Python 中加載數據
- Python 中概率評分方法的簡要介紹
- 如何用 Scikit-Learn 調整算法參數
- 如何在 Mac OS X 上安裝 Python 3 環境以進行機器學習和深度學習
- 使用 scikit-learn 進行機器學習簡介
- 從 shell 到一本帶有 Fernando Perez 單一工具的書的 IPython
- 如何使用 Python 3 為機器學習開發創建 Linux 虛擬機
- 如何在 Python 中加載機器學習數據
- 您在 Python 中的第一個機器學習項目循序漸進
- 如何使用 scikit-learn 進行預測
- 用于評估 Python 中機器學習算法的度量標準
- 使用 Pandas 為 Python 中的機器學習準備數據
- 如何使用 Scikit-Learn 為 Python 機器學習準備數據
- 項目焦點:使用 Artem Yankov 在 Python 中進行事件推薦
- 用于機器學習的 Python 生態系統
- Python 是應用機器學習的成長平臺
- Python 機器學習書籍
- Python 機器學習迷你課程
- 使用 Pandas 快速和骯臟的數據分析
- 使用 Scikit-Learn 重新調整 Python 中的機器學習數據
- 如何以及何時使用 ROC 曲線和精確調用曲線進行 Python 分類
- 使用 scikit-learn 在 Python 中保存和加載機器學習模型
- scikit-learn Cookbook 書評
- 如何使用 Anaconda 為機器學習和深度學習設置 Python 環境
- 使用 scikit-learn 在 Python 中進行 Spot-Check 分類機器學習算法
- 如何在 Python 中開發可重復使用的抽樣檢查算法框架
- 使用 scikit-learn 在 Python 中進行 Spot-Check 回歸機器學習算法
- 使用 Python 中的描述性統計來了解您的機器學習數據
- 使用 OpenCV,Python 和模板匹配來播放“哪里是 Waldo?”
- 使用 Pandas 在 Python 中可視化機器學習數據
- Machine Learning Mastery 統計學教程
- 淺談計算正態匯總統計量
- 非參數統計的溫和介紹
- Python中常態測試的溫和介紹
- 淺談Bootstrap方法
- 淺談機器學習的中心極限定理
- 淺談機器學習中的大數定律
- 機器學習的所有統計數據
- 如何計算Python中機器學習結果的Bootstrap置信區間
- 淺談機器學習的Chi-Squared測試
- 機器學習的置信區間
- 隨機化在機器學習中解決混雜變量的作用
- 機器學習中的受控實驗
- 機器學習統計學速成班
- 統計假設檢驗的關鍵值以及如何在Python中計算它們
- 如何在機器學習中談論數據(統計學和計算機科學術語)
- Python中數據可視化方法的簡要介紹
- Python中效果大小度量的溫和介紹
- 估計隨機機器學習算法的實驗重復次數
- 機器學習評估統計的溫和介紹
- 如何計算Python中的非參數秩相關性
- 如何在Python中計算數據的5位數摘要
- 如何在Python中從頭開始編寫學生t檢驗
- 如何在Python中生成隨機數
- 如何轉換數據以更好地擬合正態分布
- 如何使用相關來理解變量之間的關系
- 如何使用統計信息識別數據中的異常值
- 用于Python機器學習的隨機數生成器簡介
- k-fold交叉驗證的溫和介紹
- 如何計算McNemar的比較兩種機器學習量詞的測試
- Python中非參數統計顯著性測試簡介
- 如何在Python中使用參數統計顯著性測試
- 機器學習的預測間隔
- 應用統計學與機器學習的密切關系
- 如何使用置信區間報告分類器表現
- 統計數據分布的簡要介紹
- 15 Python中的統計假設檢驗(備忘單)
- 統計假設檢驗的溫和介紹
- 10如何在機器學習項目中使用統計方法的示例
- Python中統計功效和功耗分析的簡要介紹
- 統計抽樣和重新抽樣的簡要介紹
- 比較機器學習算法的統計顯著性檢驗
- 機器學習中統計容差區間的溫和介紹
- 機器學習統計書籍
- 評估機器學習模型的統計數據
- 機器學習統計(7天迷你課程)
- 用于機器學習的簡明英語統計
- 如何使用統計顯著性檢驗來解釋機器學習結果
- 什么是統計(為什么它在機器學習中很重要)?
- Machine Learning Mastery 時間序列入門教程
- 如何在 Python 中為時間序列預測創建 ARIMA 模型
- 用 Python 進行時間序列預測的自回歸模型
- 如何回溯機器學習模型的時間序列預測
- Python 中基于時間序列數據的基本特征工程
- R 的時間序列預測熱門書籍
- 10 挑戰機器學習時間序列預測問題
- 如何將時間序列轉換為 Python 中的監督學習問題
- 如何將時間序列數據分解為趨勢和季節性
- 如何用 ARCH 和 GARCH 模擬波動率進行時間序列預測
- 如何將時間序列數據集與 Python 區分開來
- Python 中時間序列預測的指數平滑的溫和介紹
- 用 Python 進行時間序列預測的特征選擇
- 淺談自相關和部分自相關
- 時間序列預測的 Box-Jenkins 方法簡介
- 用 Python 簡要介紹時間序列的時間序列預測
- 如何使用 Python 網格搜索 ARIMA 模型超參數
- 如何在 Python 中加載和探索時間序列數據
- 如何使用 Python 對 ARIMA 模型進行手動預測
- 如何用 Python 進行時間序列預測的預測
- 如何使用 Python 中的 ARIMA 進行樣本外預測
- 如何利用 Python 模擬殘差錯誤來糾正時間序列預測
- 使用 Python 進行數據準備,特征工程和時間序列預測的移動平均平滑
- 多步時間序列預測的 4 種策略
- 如何在 Python 中規范化和標準化時間序列數據
- 如何利用 Python 進行時間序列預測的基線預測
- 如何使用 Python 對時間序列預測數據進行功率變換
- 用于時間序列預測的 Python 環境
- 如何重構時間序列預測問題
- 如何使用 Python 重新采樣和插值您的時間序列數據
- 用 Python 編寫 SARIMA 時間序列預測
- 如何在 Python 中保存 ARIMA 時間序列預測模型
- 使用 Python 進行季節性持久性預測
- 基于 ARIMA 的 Python 歷史規模敏感性預測技巧分析
- 簡單的時間序列預測模型進行測試,這樣你就不會欺騙自己
- 標準多變量,多步驟和多站點時間序列預測問題
- 如何使用 Python 檢查時間序列數據是否是固定的
- 使用 Python 進行時間序列數據可視化
- 7 個機器學習的時間序列數據集
- 時間序列預測案例研究與 Python:波士頓每月武裝搶劫案
- Python 的時間序列預測案例研究:巴爾的摩的年度用水量
- 使用 Python 進行時間序列預測研究:法國香檳的月銷售額
- 使用 Python 的置信區間理解時間序列預測不確定性
- 11 Python 中的經典時間序列預測方法(備忘單)
- 使用 Python 進行時間序列預測表現測量
- 使用 Python 7 天迷你課程進行時間序列預測
- 時間序列預測作為監督學習
- 什么是時間序列預測?
- 如何使用 Python 識別和刪除時間序列數據的季節性
- 如何在 Python 中使用和刪除時間序列數據中的趨勢信息
- 如何在 Python 中調整 ARIMA 參數
- 如何用 Python 可視化時間序列殘差預測錯誤
- 白噪聲時間序列與 Python
- 如何通過時間序列預測項目
- Machine Learning Mastery XGBoost 教程
- 通過在 Python 中使用 XGBoost 提前停止來避免過度擬合
- 如何在 Python 中調優 XGBoost 的多線程支持
- 如何配置梯度提升算法
- 在 Python 中使用 XGBoost 進行梯度提升的數據準備
- 如何使用 scikit-learn 在 Python 中開發您的第一個 XGBoost 模型
- 如何在 Python 中使用 XGBoost 評估梯度提升模型
- 在 Python 中使用 XGBoost 的特征重要性和特征選擇
- 淺談機器學習的梯度提升算法
- 應用機器學習的 XGBoost 簡介
- 如何在 macOS 上為 Python 安裝 XGBoost
- 如何在 Python 中使用 XGBoost 保存梯度提升模型
- 從梯度提升開始,比較 165 個數據集上的 13 種算法
- 在 Python 中使用 XGBoost 和 scikit-learn 進行隨機梯度提升
- 如何使用 Amazon Web Services 在云中訓練 XGBoost 模型
- 在 Python 中使用 XGBoost 調整梯度提升的學習率
- 如何在 Python 中使用 XGBoost 調整決策樹的數量和大小
- 如何在 Python 中使用 XGBoost 可視化梯度提升決策樹
- 在 Python 中開始使用 XGBoost 的 7 步迷你課程