
[TOC]
>## 1、面積與速度基本概念
這里的**面積**指一個設計消耗FPGA/CPLD的邏輯資源的數量,**對于FPGA可以用消耗的FF(觸發器)和LUT(查找表)來衡量**,更一般的衡量方式可以用設計所占的**等價邏輯門數**。</br>
**速度**指設計在芯片上穩定運行所能達到的最高頻率,這個頻率由設計的**時序狀況**來決定,以及設計滿足的時鐘要求:PAD to PAD time 、Clock Setup Time、Clock Hold Time、Clock-to-Output Delay等眾多時序特征量密切相關。</br>
**面積**和**速度**這兩個指標貫穿FPGA/CPLD設計的時鐘,是設計質量的評價的終極標準 —— 面積和速度是一對對立統一的矛盾體。</br>
要求一個同時具備設計面積最小、運行頻率最高是不現實的。更科學的設計目標應該是在**滿足設計時序要求(包括對設計頻率的要求)的前提下,占用最小的芯片面積**。或者**在所規定的面積下,是設計的時序余量更大、頻率跑的更高**。這兩種目標充分體現了面積和速度的**平衡**的思想。
>## 2、面積優化的方式
>### 2.1 、資源共享
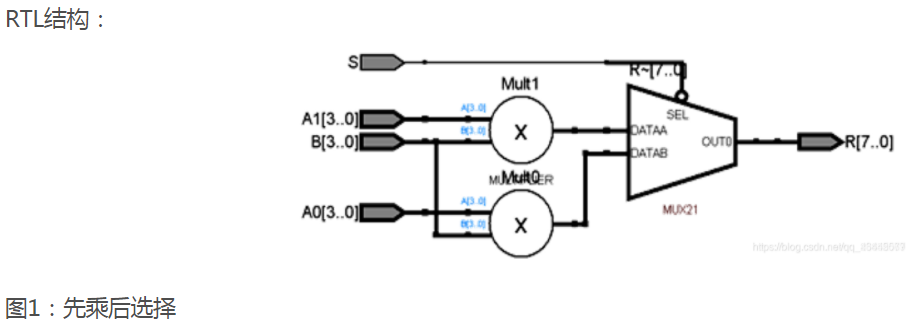
通過一個例子進行說明。現需要實現功能:通過選擇信號s來選擇執行A0 \* B還是A1 \* B的。
**描述方式1:對兩個乘法電路進行選擇**
**描述方式2: 對乘項進行選擇**
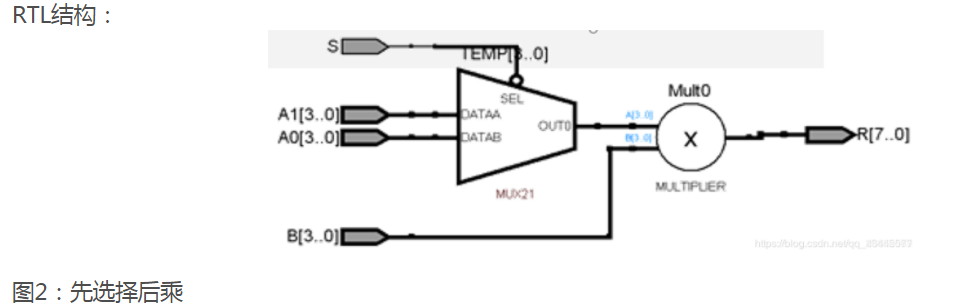
兩種方式一比較,后者在邏輯結果上沒有任何改變,但卻節省了一個代價高昂的乘法器,使得整個設計占用的面積幾乎減少了一半。
>**總結**
>* 資源共享主要針對數據通路中耗費邏輯資源較多的模塊,通過選擇、復用的方式共享使用該模塊,達到減少資源使用、優化面積的目的。
>* 并不是在任何情況下都能以此法實現資源優化,輸入與門之類的模塊使用資源共享是無意義的,有時甚至會增加資源的使用(多路選擇器的面積顯然要大于與門)。高級的HDL綜合器,如QuartusII和Synplify Pro等,通過設置能自動識別設計中需要資源共享的邏輯結構,自動地進行資源共享。
>### 2.2、邏輯優化
使用優化后的邏輯進行設計,可以明顯減少資源的占用。
>**總結**
>* 狀態機的設計要盡可能簡潔,不要搞出不必要的,多個狀態對同一個數據做處理。
>* if語句中用單bit的標志位代替多bit的數據來進行條件判斷。
>* 設計盡可能簡潔,不要弄出冗余賦值。
>### 2.3、串行化
將原來耗用**資源巨大**、單時鐘周期內完成的并行執行的邏輯塊分割開,提取出相同的邏輯模塊(一般為組合邏輯塊),在時間上利用該邏輯模塊,用多個時鐘周期完成相同的功能,其代價是工作速度被大為降低。

**描述方式1: 采用并行邏輯設計:分別相乘再相加**

**描述方式2:采用串行化設計,逐個相乘逐個相加:只需要勇1個8位的乘法器和1個16位的加法器。但是速度明顯會降低,將需要耗時5個clk才能完成一次運算,并且還需要一個附加信號start**
>## 3、速度優化的方式
一般來說,**速度優化比資源優化更重要**,需要優先考慮。速度優化包括:FPGA的結構特性、HDL綜合器性能、系統電路特性、PCB制版情況等,也包括Verilog的編程風格。下面主要討論電路結構方面的速度優化方法。
>### 3.1、流水線設計
**流水線**(Pipelining)是一種在復雜組合邏輯之間添加寄存器的方法,是最常用的速度優化技術之一。它能顯著地提高設計電路的運行速度上限。
>### 3.2 、寄存器配平 (Register Balancing)
寄存器配平是使**較長路徑縮短,較短路徑加長**,使其達到平衡從而提高工作頻率的一種技術。 </br>
若設計中,若兩個組合邏輯塊的延時差別過大,若T1>T2,則總體的工作頻率 fmax取決于T1, 即最大的延時模塊。對不合理設計進行改進,即將原本設計中的組合邏輯1的部分邏輯轉移到組合邏輯2中,使t1≈t2,且T1+T2=t1+t2, T1>t1則總體的工作頻率 fmax提高。
>### 3.3、關鍵路徑法
關鍵路徑:指設計中**從輸入到輸出經過的延時最長的邏輯路徑**。優化關鍵路徑是提高設計工作速度的有效方法。 </br>
EDA工具中的綜合器及設計分析器都提供關鍵路徑的信息以便設計者改進設計。Quartus中的**靜態時序分析**工具可以幫助找到延時最長的關鍵路徑。
>### 3.4、乒乓操作法
**乒乓操作**法是FPGA開發中的一種數據緩沖優化設計技術,可視作另一種形式的流水線技術。**乒乓操作本質是使用2倍的硬件資源,通過將數據產生時間和數據使用時間重疊,解決一個數據生產效率低于數據使用效率的問題。**是一種拿**面積換性能**的方法。通過“輸入數據流選擇單元”和“輸出數據流選擇單元”按節拍、相互配合的切換,將經過緩沖的數據流“無縫”地送到“數據流運算處理模塊。
>### 3.5、樹形結構法
若要實現A+B+C+D。首先實現AB=A+B,CD=C+D,將AB/CD鎖存一個時鐘周期再相加。**樹形結構法和上面面積優化提到的串行化是相反的**。
- 序
- 第1章 Linux下開發FPGA
- 1.1 Linux下安裝diamond
- 1.2 使用輕量級linux仿真工具iverilog
- 1.3 使用linux shell來讀寫串口
- 1.4 嵌入式上的linux
- 設備數教程
- linux C 標準庫文檔
- linux 網絡編程
- 開機啟動流程
- 1.5 linux上實現與樹莓派,FPGA等通信的串口腳本
- 第2章 Intel FPGA的使用
- 2.1 特別注意
- 2.2 高級應用開發流程
- 2.2.1 生成二進制bit流rbf
- 2.2.2 制作Preloader Image
- 2.2.2.1 生成BSP文件
- 2.2.2.2 編譯preloader和uboot
- 2.2.2.3 更新SD的preloader和uboot
- 2.3 HPS使用
- 2.3.1 通過JTAG下載代碼
- 2.3.2 HPS軟件部分開發
- 2.3 quartus中IP核的使用
- 2.3.1 Intel中RS232串口IP的使用
- 2.4 一些問題的解決方法
- 2.4.1 關于引腳的復用的綜合出錯
- 第3章 關于C/C++的一些語法
- 3.1 C中數組作為形參不傳長度
- 3.2 匯編中JUMP和CALL的區別
- 3.3 c++中map的使用
- 3.4 鏈表的一些應用
- 3.5 vector的使用
- 3.6 使用C實現一個簡單的FIFO
- 3.6.1 循環隊列
- 3.7 C語言不定長參數
- 3.8 AD采樣計算同頻信號的相位差
- 3.9 使用C實現棧
- 3.10 增量式PID
- 第4章 Xilinx的FPGA使用
- 4.1 Alinx使用中的一些問題及解決方法
- 4.1.1 在Genarate Bitstream時提示沒有name.tcl
- 4.1.2 利用verilog求位寬
- 4.1.3 vivado中AXI寫DDR說明
- 4.1.4 zynq中AXI GPIO中斷問題
- 4.1.5 關于時序約束
- 4.1.6 zynq的PS端利用串口接收電腦的數據
- 4.1.7 SDK啟動出錯的解決方法
- 4.1.8 讓工具綜合是不優化某一模塊的方法
- 4.1.9 固化程序(雙核)
- 4.1.10 分配引腳時的問題
- 4.1.11 vivado仿真時相對文件路徑的問題
- 4.2 GCC使用Attribute分配空間給變量
- 4.3 關于Zynq的DDR寫入byte和word的方法
- 4.4 常用模塊
- 4.4.1 I2S接收串轉并
- 4.5 時鐘約束
- 4.5.1 時鐘約束
- 4.6 VIVADO使用
- 4.6.1 使用vivado進行仿真
- 4.7 關于PicoBlaze軟核的使用
- 4.8 vivado一些IP的使用
- 4.8.1 float-point浮點單元的使用
- 4.10 zynq的雙核中斷
- 第5章 FPGA的那些好用的工具
- 5.1 iverilog
- 5.2 Arduino串口繪圖器工具
- 5.3 LabVIEW
- 5.4 FPGA開發實用小工具
- 5.5 Linux下繪制時序圖軟件
- 5.6 verilog和VHDL相互轉換工具
- 5.7 linux下搭建輕量易用的verilog仿真環境
- 5.8 VCS仿真verilog并查看波形
- 5.9 Verilog開源的綜合工具-Yosys
- 5.10 sublim text3編輯器配置verilog編輯環境
- 5.11 在線工具
- 真值表 -> 邏輯表達式
- 5.12 Modelsim使用命令仿真
- 5.13 使用TCL實現的個人仿真腳本
- 5.14 在cygwin下使用命令行下載arduino代碼到開發板
- 5.15 STM32開發
- 5.15.1 安裝Atollic TrueSTUDIO for STM32
- 5.15.2 LED閃爍吧
- 5.15.3 模擬U盤
- 第6章 底層實現
- 6.1 硬件實現加法的流程
- 6.2 硬件實現乘法器
- 6.3 UART實現
- 6.3.1 通用串口發送模塊
- 6.4 二進制數轉BCD碼
- 6.5 基本開源資源
- 6.5.1 深度資源
- 6.5.2 FreeCore資源集合
- 第7章 常用模塊
- 7.1 溫濕度傳感器DHT11的verilog驅動
- 7.2 DAC7631驅動(verilog)
- 7.3 按鍵消抖
- 7.4 小腳丫數碼管顯示
- 7.5 verilog實現任意人數表決器
- 7.6 基本模塊head.v
- 7.7 四相八拍步進電機驅動
- 7.8 單片機部分
- 7.8.1 I2C OLED驅動
- 第8章 verilog 掃盲區
- 8.1 時序電路中數據的讀寫
- 8.2 從RTL角度來看verilog中=和<=的區別
- 8.3 case和casez的區別
- 8.4 關于參數的傳遞與讀取(paramter)
- 8.5 關于符號優先級
- 第9章 verilog中的一些語法使用
- 9.1 可綜合的repeat
- 第10章 system verilog
- 10.1 簡介
- 10.2 推薦demo學習網址
- 10.3 VCS在linux上環境的搭建
- 10.4 deepin15.11(linux)下搭建system verilog的vcs仿真環境
- 10.5 linux上使用vcs寫的腳本仿真管理
- 10.6 system verilog基本語法
- 10.6.1 數據類型
- 10.6.2 枚舉與字符串
- 第11章 tcl/tk的使用
- 11.1 使用Tcl/Tk
- 11.2 tcl基本語法教程
- 11.3 Tk的基本語法
- 11.3.1 建立按鈕
- 11.3.2 復選框
- 11.3.3 單選框
- 11.3.4 標簽
- 11.3.5 建立信息
- 11.3.6 建立輸入框
- 11.3.7 旋轉框
- 11.3.8 框架
- 11.3.9 標簽框架
- 11.3.10 將窗口小部件分配到框架/標簽框架
- 11.3.11 建立新的上層窗口
- 11.3.12 建立菜單
- 11.3.13 上層窗口建立菜單
- 11.3.14 建立滾動條
- 11.4 窗口管理器
- 11.5 一些學習的腳本
- 11.6 一些常用的操作語法實現
- 11.6.1 刪除同一后綴的文件
- 11.7 在Lattice的Diamond中使用tcl
- 第12章 FPGA的重要知識
- 12.1 面積與速度的平衡與互換
- 12.2 硬件原則
- 12.3 系統原則
- 12.4 同步設計原則
- 12.5 乒乓操作
- 12.6 串并轉換設計技巧
- 12.7 流水線操作設計思想
- 12.8 數據接口的同步方法
- 第13章 小項目
- 13.1 數字濾波器
- 13.2 FIFO
- 13.3 一個精簡的CPU( mini-mcu )
- 13.3.1 基本功能實現
- 13.3.2 中斷添加
- 13.3.3 使用中斷實現流水燈(實際硬件驗證)
- 13.3.4 綜合一點的應用示例
- 13.4.5 使用flex開發匯編編譯器
- 13.4.5 linux--Flex and Bison
- 13.4 有符號數轉單精度浮點數
- 13.5 串口調試FPGA模板