
[TOC]
> # 說明
由于fpga的系統時鐘可能會存在差異,之前搜索的一些串口模塊都是要經過修改才能更好的適配當前的項目,為了之后可以更快的實現項目串口的添加,在這里首先寫了一個**通用串口發送模塊**,根據系統的時鐘和需要的波特率,可自行設置。
> # 實現如下
```verilog
`timescale 1ns / 1ps
// ********************************************************************
// FileName : uart_tx.v
// Author :hpy
// Email :yuan_hp@qq.com
// Date :2020年12月06日
// Description :串口發送模塊,該模塊使用時必須先復位一次,否則無法工作
// 這是因為設計的時候使用了獨熱碼,狀態沒有全零的。
// --------------------------------------------------------------------
/*-------------------------------------------
uart_tx #(
.CLK_FREQ(12000000), //時鐘頻率
.BSP(9600) // 波特率
) u1 (
.clk(clk),
.rst_n(),
.start() , // 發送觸發標志,上升沿有效
.sdata(), //要發送的數據
.tx(), //串口tx
.busy(), //忙標志
.interrupt() //發送一個字節完畢的中斷信號,數據發送完畢后會產生一個clk的上升沿脈沖
);
--------------------------------------------*/
module uart_tx#(
parameter CLK_FREQ = 12000000, //時鐘頻率
BSP = 9600 // 波特率
)(
input clk,
input rst_n,
input start , // 發送觸發標志,上升沿有效
input [7:0]sdata, //要發送的數據
output reg tx,
output reg busy, //忙標志
output interrupt //中斷信號
);
localparam CNT_MAX = CLK_FREQ / BSP; //根據時鐘頻率和波特率計算分頻值
localparam CNT_HALF = (CNT_MAX>>1) ; //
//狀態機狀態
localparam
IDEL = 6'b000001,
PRE = 6'b000010,
START = 6'b000100,
TX_DATA = 6'b001000,
TX_CHECK = 6'b010000,
STOP = 6'b100000;
//assign busy = (nst != IDEL ) ;
always @(posedge clk) begin
if( !rst_n ) busy <= 1'b0;
else begin
if(start_p && (cst==IDEL))
busy <= 1'b1;
else if(nst == IDEL && bsp_clk)
busy <= 1'b0;
else busy <= busy;
end
end
reg [5:0] cst,nst;
/*****************************************************
* 產生數據接發送完畢的中斷信號
*****************************************************/
reg busy_f;
assign interrupt = (~busy) & busy_f;
always@(posedge clk) begin
if( !rst_n ) begin
busy_f <= 1'b0;
end
else begin
busy_f <= busy;
end
end
function integer clog2 (input integer din);
for( clog2 = 0; din; clog2=clog2 +1)
din = din >>1;
endfunction
/*****************************************************
* 檢測觸發信號上升沿
*****************************************************/
reg start_f;
wire start_p;
assign start_p = start & (~start_f);
always@(posedge clk) begin
if ( !rst_n ) begin
start_f <= 1'b0;
//start_p <= 1'b0;
end else begin
start_f <= start;
//start_p <= start & (~start_f);
end
end
reg [ clog2(CNT_MAX) - 1 : 0 ] cnt ; //計數器
/*****************************************************
* 計數產生bps
*****************************************************/
wire bsp_clk;
assign bsp_clk = (cnt == CNT_HALF)? 1'B1 : 1'B0;
always@(posedge clk ) begin
if(!rst_n)begin
cnt <= 'd0;
end
else begin
if( cnt >= CNT_MAX - 1'b1 || ((cst == IDEL) && (start_p)))
cnt <= 1'b0;
else if(busy)
cnt <= cnt + 1'b1;
else cnt <= 'd0;
end
end
/*****************************************************
* 狀態機到下一狀態
*****************************************************/
always@(posedge clk) begin
if(rst_n == 1'b0 )begin
cst <= IDEL;
end else begin
if(cst == IDEL ) cst <= nst;
else
cst <= (bsp_clk) ? nst : cst;
end
end
/*****************************************************
* 狀態機下一狀態選擇
*****************************************************/
reg [ 3 : 0 ] tx_cnt;
always@(*) begin
nst = IDEL;
case(cst)
IDEL : nst = (start_p)? PRE : IDEL;
PRE : nst = START;
START : nst = TX_DATA;
TX_DATA : nst = (tx_cnt >= 4'd8)? TX_CHECK : TX_DATA;
TX_CHECK :nst = STOP;
STOP: nst = IDEL;
default:nst = IDEL;
endcase
end
/*****************************************************
* 狀態機輸出
*****************************************************/
reg [7:0]tx_buf;
always@(posedge clk) begin
if(rst_n == 1'b0 )begin
tx <= 1'b1;
tx_cnt <= 4'd0;
end
else begin
case(nst)
IDEL: begin
tx <= 1'b1;
end
PRE: begin //由于時鐘的原因,計算得到的分頻值可能是小數,因此每次發數據之前都回復初始狀態,不讓誤差累積,等一拍可實現
tx <= 1'b1;
tx_buf <= sdata;
end
START: if(bsp_clk) begin
tx <= 1'b0;
//tx_buf <= sdata;
tx_cnt <= 4'd0 ;
end
TX_DATA: if(bsp_clk) begin
tx_cnt <= tx_cnt + 1'b1;
tx <= tx_buf[0];
tx_buf <= tx_buf >> 1 ;
end
TX_CHECK : if(bsp_clk)begin //奇偶校驗
tx <= 1'b1;
tx_cnt <= 4'b0;
end
STOP: if(bsp_clk) begin //停止位
tx <= 1'b1;
end
default: tx <= 1'b1;
endcase
end
end
endmodule
```
> # 使用示例
```verilog
module top
(
input clk, //輸入系統12MHz時鐘
output tx
);
wire tflag;
wire rst_n;
//產生復位信號
Rst_sys #(
.N(9000000) // 計數器最大值 ,取值要大于2
) rst_u1(
.clk(clk),
.rst_n(rst_n)
);
divide #(
.N(12000000)
) u2 (
.clk(clk),
.rst_n(rst_n),
.clkout(tflag)
);
reg [7:0] tx_data;
wire tx_inte;
always@(posedge clk) begin
if(rst_n == 0) begin
tx_data <=0;
start <= 1'b0;
end
else if(!tx_busy && (start==1'b0))begin
tx_data <= tx_data + 1;
start <= 1'b1;
end
else begin
start <= 1'b0;
end
end
wire tx_busy;
reg start;
uart_tx #(
.CLK_FREQ(12000000), //時鐘頻率
.BSP(9600) // 波特率
) u1 (
.clk(clk),
.rst_n(rst_n),
.start(start) , // 發送觸發標志,上升沿有效
.sdata(tx_data), //要發送的數據
.tx(tx), //串口tx
.interrupt(tx_inte),
.busy(tx_busy) //忙標志
);
endmodule
```
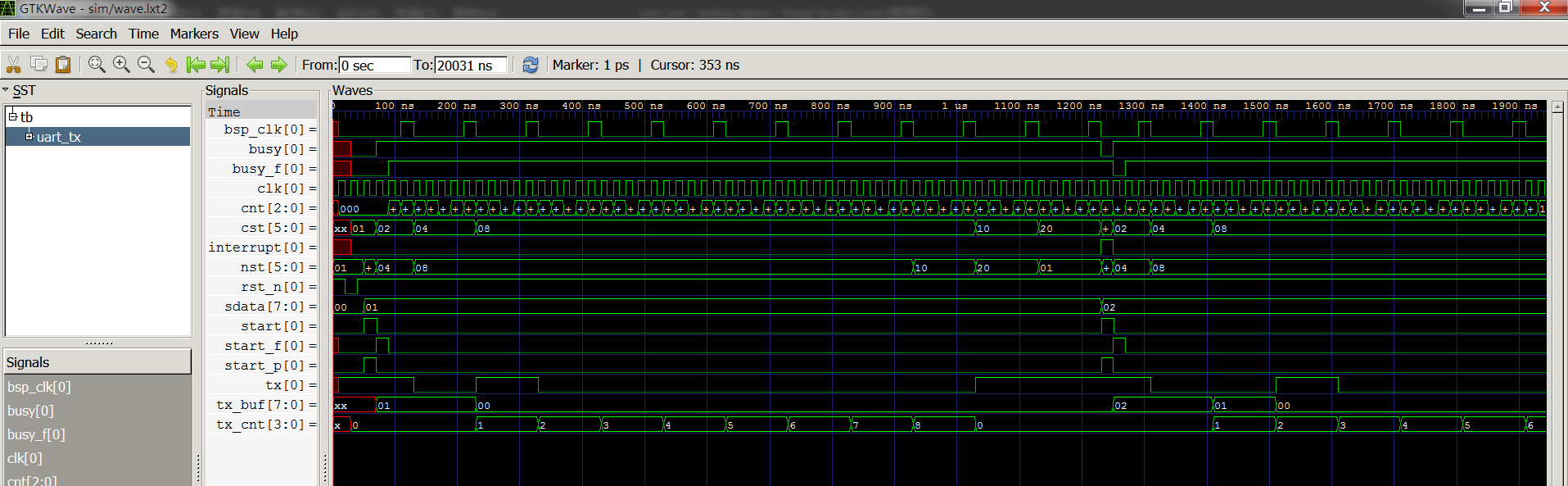
> # 仿真波形
- 序
- 第1章 Linux下開發FPGA
- 1.1 Linux下安裝diamond
- 1.2 使用輕量級linux仿真工具iverilog
- 1.3 使用linux shell來讀寫串口
- 1.4 嵌入式上的linux
- 設備數教程
- linux C 標準庫文檔
- linux 網絡編程
- 開機啟動流程
- 1.5 linux上實現與樹莓派,FPGA等通信的串口腳本
- 第2章 Intel FPGA的使用
- 2.1 特別注意
- 2.2 高級應用開發流程
- 2.2.1 生成二進制bit流rbf
- 2.2.2 制作Preloader Image
- 2.2.2.1 生成BSP文件
- 2.2.2.2 編譯preloader和uboot
- 2.2.2.3 更新SD的preloader和uboot
- 2.3 HPS使用
- 2.3.1 通過JTAG下載代碼
- 2.3.2 HPS軟件部分開發
- 2.3 quartus中IP核的使用
- 2.3.1 Intel中RS232串口IP的使用
- 2.4 一些問題的解決方法
- 2.4.1 關于引腳的復用的綜合出錯
- 第3章 關于C/C++的一些語法
- 3.1 C中數組作為形參不傳長度
- 3.2 匯編中JUMP和CALL的區別
- 3.3 c++中map的使用
- 3.4 鏈表的一些應用
- 3.5 vector的使用
- 3.6 使用C實現一個簡單的FIFO
- 3.6.1 循環隊列
- 3.7 C語言不定長參數
- 3.8 AD采樣計算同頻信號的相位差
- 3.9 使用C實現棧
- 3.10 增量式PID
- 第4章 Xilinx的FPGA使用
- 4.1 Alinx使用中的一些問題及解決方法
- 4.1.1 在Genarate Bitstream時提示沒有name.tcl
- 4.1.2 利用verilog求位寬
- 4.1.3 vivado中AXI寫DDR說明
- 4.1.4 zynq中AXI GPIO中斷問題
- 4.1.5 關于時序約束
- 4.1.6 zynq的PS端利用串口接收電腦的數據
- 4.1.7 SDK啟動出錯的解決方法
- 4.1.8 讓工具綜合是不優化某一模塊的方法
- 4.1.9 固化程序(雙核)
- 4.1.10 分配引腳時的問題
- 4.1.11 vivado仿真時相對文件路徑的問題
- 4.2 GCC使用Attribute分配空間給變量
- 4.3 關于Zynq的DDR寫入byte和word的方法
- 4.4 常用模塊
- 4.4.1 I2S接收串轉并
- 4.5 時鐘約束
- 4.5.1 時鐘約束
- 4.6 VIVADO使用
- 4.6.1 使用vivado進行仿真
- 4.7 關于PicoBlaze軟核的使用
- 4.8 vivado一些IP的使用
- 4.8.1 float-point浮點單元的使用
- 4.10 zynq的雙核中斷
- 第5章 FPGA的那些好用的工具
- 5.1 iverilog
- 5.2 Arduino串口繪圖器工具
- 5.3 LabVIEW
- 5.4 FPGA開發實用小工具
- 5.5 Linux下繪制時序圖軟件
- 5.6 verilog和VHDL相互轉換工具
- 5.7 linux下搭建輕量易用的verilog仿真環境
- 5.8 VCS仿真verilog并查看波形
- 5.9 Verilog開源的綜合工具-Yosys
- 5.10 sublim text3編輯器配置verilog編輯環境
- 5.11 在線工具
- 真值表 -> 邏輯表達式
- 5.12 Modelsim使用命令仿真
- 5.13 使用TCL實現的個人仿真腳本
- 5.14 在cygwin下使用命令行下載arduino代碼到開發板
- 5.15 STM32開發
- 5.15.1 安裝Atollic TrueSTUDIO for STM32
- 5.15.2 LED閃爍吧
- 5.15.3 模擬U盤
- 第6章 底層實現
- 6.1 硬件實現加法的流程
- 6.2 硬件實現乘法器
- 6.3 UART實現
- 6.3.1 通用串口發送模塊
- 6.4 二進制數轉BCD碼
- 6.5 基本開源資源
- 6.5.1 深度資源
- 6.5.2 FreeCore資源集合
- 第7章 常用模塊
- 7.1 溫濕度傳感器DHT11的verilog驅動
- 7.2 DAC7631驅動(verilog)
- 7.3 按鍵消抖
- 7.4 小腳丫數碼管顯示
- 7.5 verilog實現任意人數表決器
- 7.6 基本模塊head.v
- 7.7 四相八拍步進電機驅動
- 7.8 單片機部分
- 7.8.1 I2C OLED驅動
- 第8章 verilog 掃盲區
- 8.1 時序電路中數據的讀寫
- 8.2 從RTL角度來看verilog中=和<=的區別
- 8.3 case和casez的區別
- 8.4 關于參數的傳遞與讀取(paramter)
- 8.5 關于符號優先級
- 第9章 verilog中的一些語法使用
- 9.1 可綜合的repeat
- 第10章 system verilog
- 10.1 簡介
- 10.2 推薦demo學習網址
- 10.3 VCS在linux上環境的搭建
- 10.4 deepin15.11(linux)下搭建system verilog的vcs仿真環境
- 10.5 linux上使用vcs寫的腳本仿真管理
- 10.6 system verilog基本語法
- 10.6.1 數據類型
- 10.6.2 枚舉與字符串
- 第11章 tcl/tk的使用
- 11.1 使用Tcl/Tk
- 11.2 tcl基本語法教程
- 11.3 Tk的基本語法
- 11.3.1 建立按鈕
- 11.3.2 復選框
- 11.3.3 單選框
- 11.3.4 標簽
- 11.3.5 建立信息
- 11.3.6 建立輸入框
- 11.3.7 旋轉框
- 11.3.8 框架
- 11.3.9 標簽框架
- 11.3.10 將窗口小部件分配到框架/標簽框架
- 11.3.11 建立新的上層窗口
- 11.3.12 建立菜單
- 11.3.13 上層窗口建立菜單
- 11.3.14 建立滾動條
- 11.4 窗口管理器
- 11.5 一些學習的腳本
- 11.6 一些常用的操作語法實現
- 11.6.1 刪除同一后綴的文件
- 11.7 在Lattice的Diamond中使用tcl
- 第12章 FPGA的重要知識
- 12.1 面積與速度的平衡與互換
- 12.2 硬件原則
- 12.3 系統原則
- 12.4 同步設計原則
- 12.5 乒乓操作
- 12.6 串并轉換設計技巧
- 12.7 流水線操作設計思想
- 12.8 數據接口的同步方法
- 第13章 小項目
- 13.1 數字濾波器
- 13.2 FIFO
- 13.3 一個精簡的CPU( mini-mcu )
- 13.3.1 基本功能實現
- 13.3.2 中斷添加
- 13.3.3 使用中斷實現流水燈(實際硬件驗證)
- 13.3.4 綜合一點的應用示例
- 13.4.5 使用flex開發匯編編譯器
- 13.4.5 linux--Flex and Bison
- 13.4 有符號數轉單精度浮點數
- 13.5 串口調試FPGA模板