
[TOC]
>
# 說明
因為平時經常要驅動步進電機,在這里寫一個簡單的驅動四相八拍電機,這個模塊主要是為了配合MCU,MCU給出方向,步進步數,然后給一個上升沿的觸發信號就可以了。
> # 組成模塊
## 定時器模塊
用于產生驅動步進電機的脈沖,可對時鐘進行分頻
timer:
```verilog
`timescale 1ns / 1ps
// ********************************************************************
// FileName : timer.v
// Author :hpy
// Email :yuan_hp@qq.com
// Date :2020年11月23日
// Description :一個用verilog實現的定時器
// --------------------------------------------------------------------
module timer #(parameter WIDTH = 32)(
input clk,
input rst_n,
input [ WIDTH - 1 : 0 ] T, //周期
input [ WIDTH - 1 : 0 ] duty, //占空比
output reg[ 0 : 0 ] intr , //中斷信號
output pwm //輸出pwm
);
reg[ WIDTH - 1 : 0 ] Cnt;
reg[ 0 : 0 ] pwm_reg;
assign pwm = (T==0)? 0 : (T == 1)? clk : pwm_reg;
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)begin
Cnt <= 0;
intr <= 0;
end
else begin
if(Cnt >= T - 1'b1) begin Cnt <= 0; intr <= 1'b1; end
else begin Cnt <= Cnt + 1'b1; intr <= 1'b0; end
pwm_reg <= (Cnt<= duty)?1'b1:1'b0;
end
end
endmodule
```
## 可控脈沖生成模塊
用于生成給定步數的脈沖
MultiPluseGen.v
```verilog
`timescale 1ns / 1ps
// ********************************************************************
// FileName : MultiPluseGen.v
// Author :hpy
// Email :yuan_hp@qq.com
// Date :2020年11月24日
// Description :觸發一次產生多個脈沖,脈沖個數可控
// --------------------------------------------------------------------
module MultiPluseGen #(
parameter integer WIDTH = 32
)(
input clk, //
input rst_n,
input en,
input start, //觸發信號標志, 上升沿觸發
input [ WIDTH - 1 : 0] step,//產生的脈沖個數
input [ WIDTH - 1 : 0] period, //產生的脈沖周期,對clk的分頻
output pluse,
output done //一次觸發完成標志,1 觸發完成 0 等待觸發或者觸發中
);
wire start_p ,work_clk ;
reg start_f1;
reg [ WIDTH - 1 : 0 ] cnt , step_reg ;
assign start_p = start & ~start_f1; //check posedge
assign pluse = ((cst == S1) && en )? work_clk : 1'b0;
assign done = cst == S0;
localparam S0 = 1'b0,
S1 = 1'b1;
reg [0:0] cst,nst;
always@(posedge work_clk or negedge rst_n)
begin
if(!rst_n)start_f1 <= 0;
else if(en)start_f1 <= start;
end
//go to next status
always@(posedge work_clk or negedge rst_n)
begin
if(!rst_n)begin
cst <= S0;
end
else begin
cst <= en ? nst : cst;
end
end
//
//
always@(*)
begin
//nst = S0;
case(cst)
S0: nst = (en & start_p) ? S1 : S0; // if en and check the posedge of start,go to S1 status
S1: nst = ((1==en) && (cnt>= step_reg)) ? S0:S1;
default: nst = S0;
endcase
end
always @ (posedge work_clk or negedge rst_n ) begin
if(!rst_n)begin
cnt <= 0;
step_reg <= 0;
end
else begin
if(en)begin
if((cst == S0) && (start_p==1'b1)) begin
cnt <= 1;
step_reg <= step;
end
else if(nst == S1) cnt <= cnt + 1;
else cnt <= 0;
end
end
end
wire [WIDTH - 1 : 0]duty;
assign duty = (period >> 1) - 1'b1;
wire sclk;
assign sclk = en ;
timer timer_inst (
.clk(clk),
.rst_n(rst_n),
.T(period), //周期
.duty(duty), //占空比
.pwm(work_clk)
);
endmodule
```
## 將脈沖轉化為輸出的模塊
StepMotor.v
```verilog
`timescale 1ns / 1ps
// ********************************************************************
// FileName : StepMotor48.v
// Author :hpy
// Email :yuan_hp@qq.com
// Date :2020年11月24日
// Description :這是五線四相電機驅動模塊(四象八拍電機) pwm --> 驅動
// --------------------------------------------------------------------
module StepMotor48(
input pwm,
input rst_n,
input en,
input dir,
output reg [3:0] driver
);
reg [7:0] cst, nst; // status
localparam S0 = 4'b1000,
S1 = 4'b1100,
S2 = 4'b0100,
S3 = 4'b0110,
S4 = 4'b0010,
S5 = 4'b0011,
S6 = 4'b0001,
S7 = 4'b1001;
// go to next state transition
always @(posedge pwm or negedge rst_n) begin
if(!rst_n)begin
cst = S0;
end
else begin
if(en) cst = nst;
end
end
//state transition
always @ (cst) begin
nst = S0;
case(cst)
S0: nst = en? S1 :S0 ;
S1: nst = en? S2 :S1 ;
S2: nst = en? S3 :S2 ;
S3: nst = en? S4 :S3 ;
S4: nst = en? S5 :S4 ;
S5: nst = en? S6 :S5 ;
S6: nst = en? S7 :S6 ;
S7: nst = en? S0 :S7 ;
default:nst = S0;
endcase
end
//out
integer i;
always@(posedge pwm or negedge rst_n) begin
if(! rst_n )begin
driver = S0;
end
else begin
if(en)begin
if(dir) driver = nst;
else for(i=0;i<4;i=i+1) driver[i] = nst[3-i] ;
end
end
end
endmodule
```
## 仿真時序生成
tb.v
```verilog
`timescale 1ns / 1ps
module tb ;
reg clk,rst_n;
//生成始時鐘
parameter NCLK = 20; //此時時鐘為50MHz
initial begin
clk=0;
forever clk=#(NCLK/2) ~clk;
end
/****************** ADD module inst ******************/
reg [31:0] step;
reg start,dir , en;
wire done, pluse;
MultiPluseGen #(.WIDTH(32)) MultiPluseGen_inst (
.clk(clk), //
.rst_n(rst_n),
.en(en),
.start(start), //觸發信號標志, 上升沿觸發
.step(step),//產生的脈沖個數
.period(5), //產生的脈沖周期,對clk的分頻
.done(done), //一次觸發完成標志,1 觸發完成 0 等待觸發或者觸發中
.pluse(pluse)
);
StepMotor48 motor(
.pwm(pluse),
.rst_n(rst_n),
.en(en),
.dir(dir)
);
/****************** --- module inst ******************/
initial begin
$dumpfile("wave.lxt2");
$dumpvars(0, tb); //dumpvars(深度, 實例化模塊1,實例化模塊2,.....)
end
initial begin
rst_n = 1;
start = 0;
dir = 0;
step=0;
#(NCLK) rst_n=0;
#(NCLK) rst_n=1; //復位信號
repeat(10000) @(posedge MultiPluseGen_inst.work_clk)begin
# 1 ; //作為延時時間
if(done)begin
start = $random;
en = $random;
dir = $random;
if(start)step[3:0] = $random;
end
else start = 0;
end
$display("運行結束!");
$dumpflush;
$finish;
$stop;
end
endmodule
```
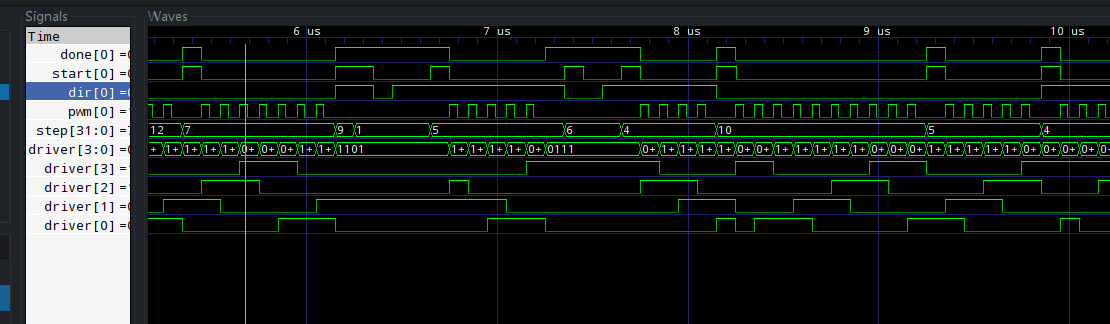
> # 仿真結果
- 序
- 第1章 Linux下開發FPGA
- 1.1 Linux下安裝diamond
- 1.2 使用輕量級linux仿真工具iverilog
- 1.3 使用linux shell來讀寫串口
- 1.4 嵌入式上的linux
- 設備數教程
- linux C 標準庫文檔
- linux 網絡編程
- 開機啟動流程
- 1.5 linux上實現與樹莓派,FPGA等通信的串口腳本
- 第2章 Intel FPGA的使用
- 2.1 特別注意
- 2.2 高級應用開發流程
- 2.2.1 生成二進制bit流rbf
- 2.2.2 制作Preloader Image
- 2.2.2.1 生成BSP文件
- 2.2.2.2 編譯preloader和uboot
- 2.2.2.3 更新SD的preloader和uboot
- 2.3 HPS使用
- 2.3.1 通過JTAG下載代碼
- 2.3.2 HPS軟件部分開發
- 2.3 quartus中IP核的使用
- 2.3.1 Intel中RS232串口IP的使用
- 2.4 一些問題的解決方法
- 2.4.1 關于引腳的復用的綜合出錯
- 第3章 關于C/C++的一些語法
- 3.1 C中數組作為形參不傳長度
- 3.2 匯編中JUMP和CALL的區別
- 3.3 c++中map的使用
- 3.4 鏈表的一些應用
- 3.5 vector的使用
- 3.6 使用C實現一個簡單的FIFO
- 3.6.1 循環隊列
- 3.7 C語言不定長參數
- 3.8 AD采樣計算同頻信號的相位差
- 3.9 使用C實現棧
- 3.10 增量式PID
- 第4章 Xilinx的FPGA使用
- 4.1 Alinx使用中的一些問題及解決方法
- 4.1.1 在Genarate Bitstream時提示沒有name.tcl
- 4.1.2 利用verilog求位寬
- 4.1.3 vivado中AXI寫DDR說明
- 4.1.4 zynq中AXI GPIO中斷問題
- 4.1.5 關于時序約束
- 4.1.6 zynq的PS端利用串口接收電腦的數據
- 4.1.7 SDK啟動出錯的解決方法
- 4.1.8 讓工具綜合是不優化某一模塊的方法
- 4.1.9 固化程序(雙核)
- 4.1.10 分配引腳時的問題
- 4.1.11 vivado仿真時相對文件路徑的問題
- 4.2 GCC使用Attribute分配空間給變量
- 4.3 關于Zynq的DDR寫入byte和word的方法
- 4.4 常用模塊
- 4.4.1 I2S接收串轉并
- 4.5 時鐘約束
- 4.5.1 時鐘約束
- 4.6 VIVADO使用
- 4.6.1 使用vivado進行仿真
- 4.7 關于PicoBlaze軟核的使用
- 4.8 vivado一些IP的使用
- 4.8.1 float-point浮點單元的使用
- 4.10 zynq的雙核中斷
- 第5章 FPGA的那些好用的工具
- 5.1 iverilog
- 5.2 Arduino串口繪圖器工具
- 5.3 LabVIEW
- 5.4 FPGA開發實用小工具
- 5.5 Linux下繪制時序圖軟件
- 5.6 verilog和VHDL相互轉換工具
- 5.7 linux下搭建輕量易用的verilog仿真環境
- 5.8 VCS仿真verilog并查看波形
- 5.9 Verilog開源的綜合工具-Yosys
- 5.10 sublim text3編輯器配置verilog編輯環境
- 5.11 在線工具
- 真值表 -> 邏輯表達式
- 5.12 Modelsim使用命令仿真
- 5.13 使用TCL實現的個人仿真腳本
- 5.14 在cygwin下使用命令行下載arduino代碼到開發板
- 5.15 STM32開發
- 5.15.1 安裝Atollic TrueSTUDIO for STM32
- 5.15.2 LED閃爍吧
- 5.15.3 模擬U盤
- 第6章 底層實現
- 6.1 硬件實現加法的流程
- 6.2 硬件實現乘法器
- 6.3 UART實現
- 6.3.1 通用串口發送模塊
- 6.4 二進制數轉BCD碼
- 6.5 基本開源資源
- 6.5.1 深度資源
- 6.5.2 FreeCore資源集合
- 第7章 常用模塊
- 7.1 溫濕度傳感器DHT11的verilog驅動
- 7.2 DAC7631驅動(verilog)
- 7.3 按鍵消抖
- 7.4 小腳丫數碼管顯示
- 7.5 verilog實現任意人數表決器
- 7.6 基本模塊head.v
- 7.7 四相八拍步進電機驅動
- 7.8 單片機部分
- 7.8.1 I2C OLED驅動
- 第8章 verilog 掃盲區
- 8.1 時序電路中數據的讀寫
- 8.2 從RTL角度來看verilog中=和<=的區別
- 8.3 case和casez的區別
- 8.4 關于參數的傳遞與讀取(paramter)
- 8.5 關于符號優先級
- 第9章 verilog中的一些語法使用
- 9.1 可綜合的repeat
- 第10章 system verilog
- 10.1 簡介
- 10.2 推薦demo學習網址
- 10.3 VCS在linux上環境的搭建
- 10.4 deepin15.11(linux)下搭建system verilog的vcs仿真環境
- 10.5 linux上使用vcs寫的腳本仿真管理
- 10.6 system verilog基本語法
- 10.6.1 數據類型
- 10.6.2 枚舉與字符串
- 第11章 tcl/tk的使用
- 11.1 使用Tcl/Tk
- 11.2 tcl基本語法教程
- 11.3 Tk的基本語法
- 11.3.1 建立按鈕
- 11.3.2 復選框
- 11.3.3 單選框
- 11.3.4 標簽
- 11.3.5 建立信息
- 11.3.6 建立輸入框
- 11.3.7 旋轉框
- 11.3.8 框架
- 11.3.9 標簽框架
- 11.3.10 將窗口小部件分配到框架/標簽框架
- 11.3.11 建立新的上層窗口
- 11.3.12 建立菜單
- 11.3.13 上層窗口建立菜單
- 11.3.14 建立滾動條
- 11.4 窗口管理器
- 11.5 一些學習的腳本
- 11.6 一些常用的操作語法實現
- 11.6.1 刪除同一后綴的文件
- 11.7 在Lattice的Diamond中使用tcl
- 第12章 FPGA的重要知識
- 12.1 面積與速度的平衡與互換
- 12.2 硬件原則
- 12.3 系統原則
- 12.4 同步設計原則
- 12.5 乒乓操作
- 12.6 串并轉換設計技巧
- 12.7 流水線操作設計思想
- 12.8 數據接口的同步方法
- 第13章 小項目
- 13.1 數字濾波器
- 13.2 FIFO
- 13.3 一個精簡的CPU( mini-mcu )
- 13.3.1 基本功能實現
- 13.3.2 中斷添加
- 13.3.3 使用中斷實現流水燈(實際硬件驗證)
- 13.3.4 綜合一點的應用示例
- 13.4.5 使用flex開發匯編編譯器
- 13.4.5 linux--Flex and Bison
- 13.4 有符號數轉單精度浮點數
- 13.5 串口調試FPGA模板