
[TOC]
> # 簡介
近段時間做項目,涉及到一些傳感器數據的采集,比如溫度傳感器`DHT11`,這種東西使用FPGA來做,為了實現他的時序,如果自己寫的話那是真的不容易,但是對于項目來說,這個東西有需要做,怎么辦?于是在FPGA或者CPLD中做一個占用資源可控,且能在各個平臺下移植的可編程狀態機就進入了我的視野。
說時遲那時快,花了一天時間寫了一個簡單的8位mcu,在功能上僅僅只有簡單的輸入輸出功能,加減法,邏輯運算,支持跳轉,調用,比較等指令。
> # 主要實現功能
目前該mcu的主要情況如下:
* 內部16個寄存器,s0 ~ sF
* 設計一個深度為31的程序指針棧,用于支持CALL命令
* 支持8位加減法運算,通過設計的標志位可以實現16為,32位的加減法運算
* 支持邏輯運算,AND,OR,XOR
* 有一個中斷輸入口
* 可在mcu外部使用邏輯資源擴展中斷--利用標志位的方式
從實現功能上來看,似乎比較少,但是我們依舊可以使用這些有限的命令實現我們的初衷,就是實現與一些簡單傳感器的交互,甚至可以實現I2C,SPI的通信接口。
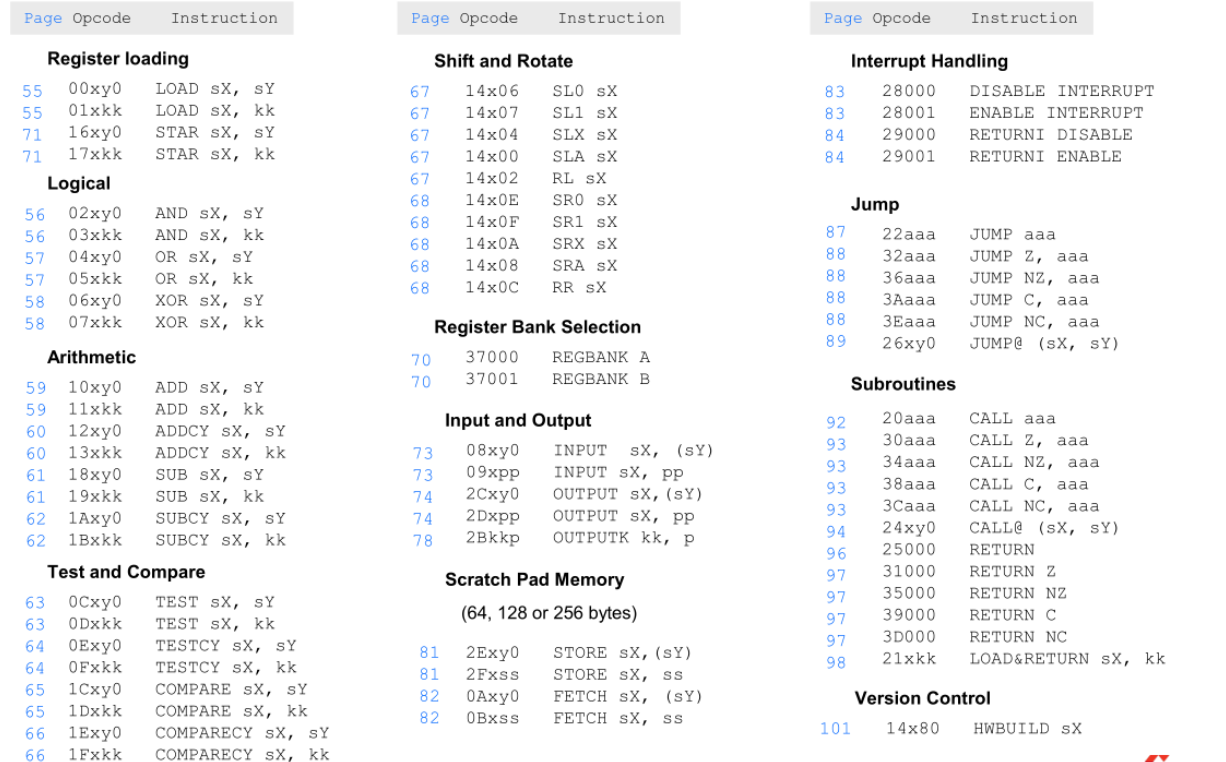
在指令上為了不用自己開發將匯編翻譯為機器指令的工具,這里直接和xilinx的picoblaze的指令保持一致,換句話說,使用xilinx的工具可以將我們的匯編代碼翻譯成支持這個mini-mcu的機器指令。
> # 有什么特有的特性
在一些資源有限的CPLD上,完全實現一個mcu是不現實,為了契合我的初衷,并且不讓資源被浪費太多,我字節寫了腳本,可以根據寫的匯編代碼,將匯編代碼中使用到的命令提取出來,并會直接將`mini-mcu`與這些命令有關的部分保留,**裁剪掉其他沒有用到的部分**,但是輸入輸出部分將會一直保留。另外由于沒有實現其他一些復雜的指令,**這些指令都是在兩個時鐘周期中完成的**,也就是說基于這個特性,可以實現精確的時鐘延時。
> # 環境準備
由于自己適應了linux的環境,所以實現的腳本都是使用`bash`寫的,包括裁剪mcu,如果不會linux指令也沒事,只不過不能自動化的生成這些東西,需要自己手動來,包括裁剪mcu,當然這種情況下,你可以不裁剪。
**說一說在為了支持linux指令,在windows系統上應該怎么準備環境**
## step1:安裝cygwin以支持bash腳本
Cygwin就是一個windows軟件,該軟件就是在windows上仿真linux操作系統 ,簡言之,cygwin是一個在windows平臺上運行的 linux模擬環境,使用一個Dll(動態鏈接庫)來實現 這樣,我們可以開發出Cygwin下的UNIX工具,使用這個DLL運行在Windows下。
**安裝方法**
**1、下載`cygwin`安裝器**
下載地址:[官方地址](http://www.cygwin.com/)
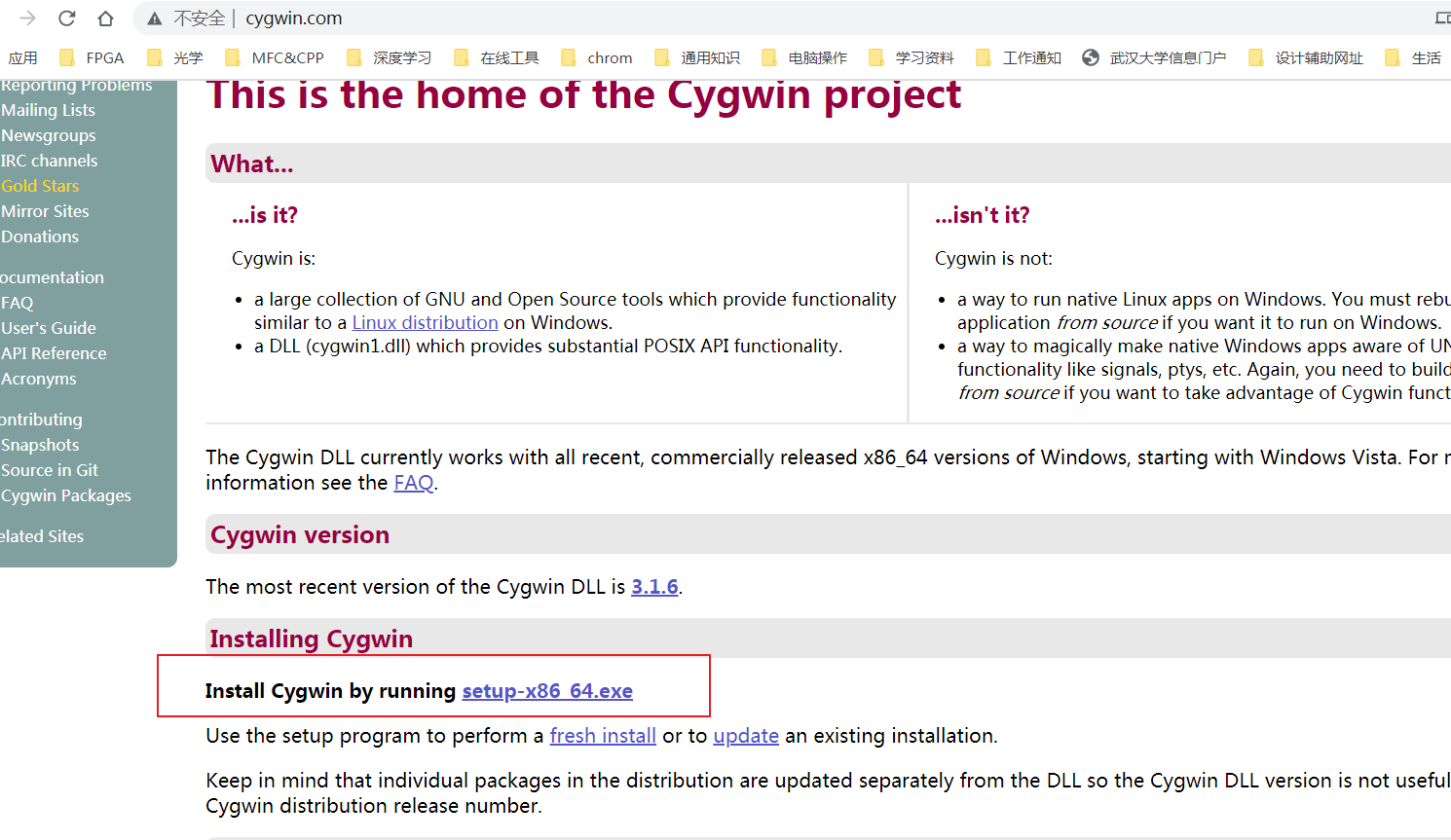
然后就可以使用這個安裝器進行安裝了
**2、啟動安裝器進行安裝**
安裝器有三種安裝模式可供選擇:
```
①Install from Internet,這種模式直接從Internet安裝,適合網速較快的情況;
②Download Without Installing,這種模式只從網上下載Cygwin的組件包,但不安裝;
③Install from Local Directory,這種模式與上面第二種模式對應,當你的Cygwin組件包已經下載到本地,則可以使用此模式從本地安裝Cygwin
```
***說明:當你安裝過,在執行該安裝程序可以選擇本地安裝,然后添加需要擴展的命令。***
第一次安裝使用第一種方式進行安裝:

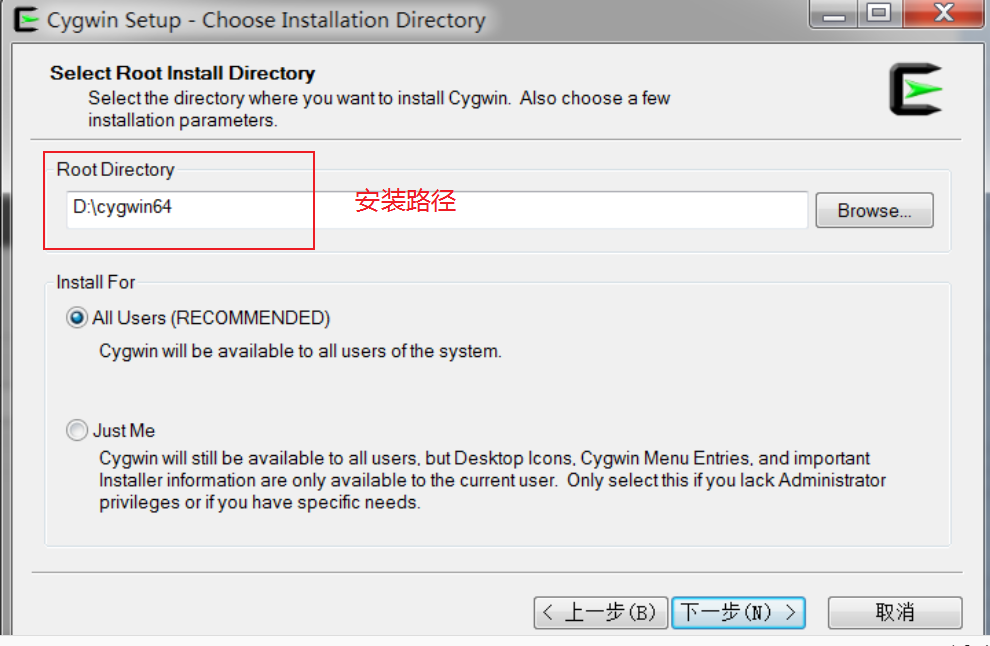
**在下載的同時,建議將Cygwin安裝組件也保存到了本地,以便以后能夠再次安裝,這一步選擇安裝過程中從網上下載的Cygwin組件包的保存位**

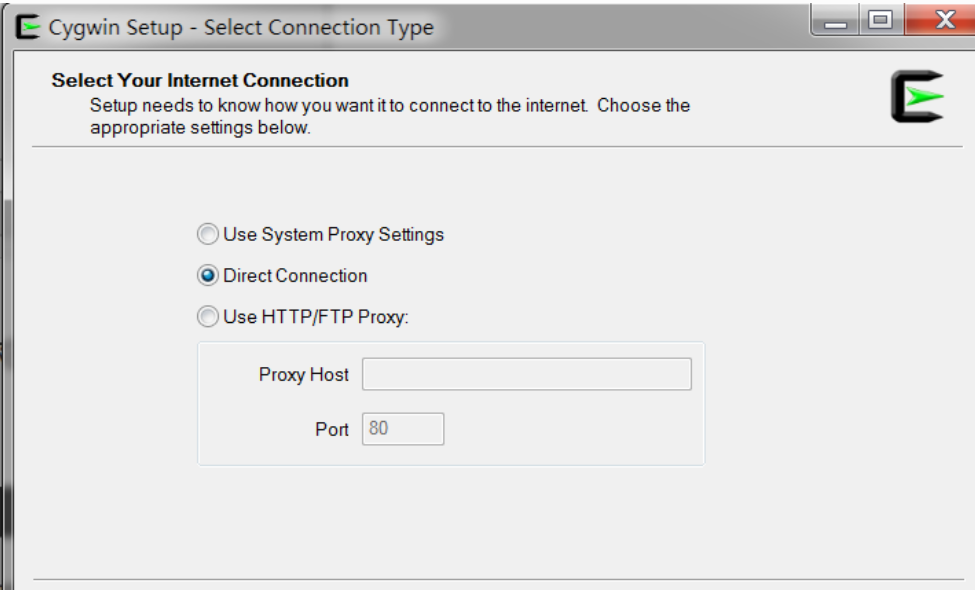
**選擇連接方式**
這一步選擇連接的方式,選擇你的連接方式,然后點擊下一步,會出現選擇下載站點的對話框,如下圖所示
```
①Use System Proxy Settings 使用系統的代理設置
②Direct Connection 一般多數用戶都是這種直接連接的網絡,所以都是直接使用默認設置即可
③Use HTTP/FTP Proxy 使用HTTP或FTP類型的代理。如果有需要,自己選擇此項后,設置對應的代理地址和端口,即可
```
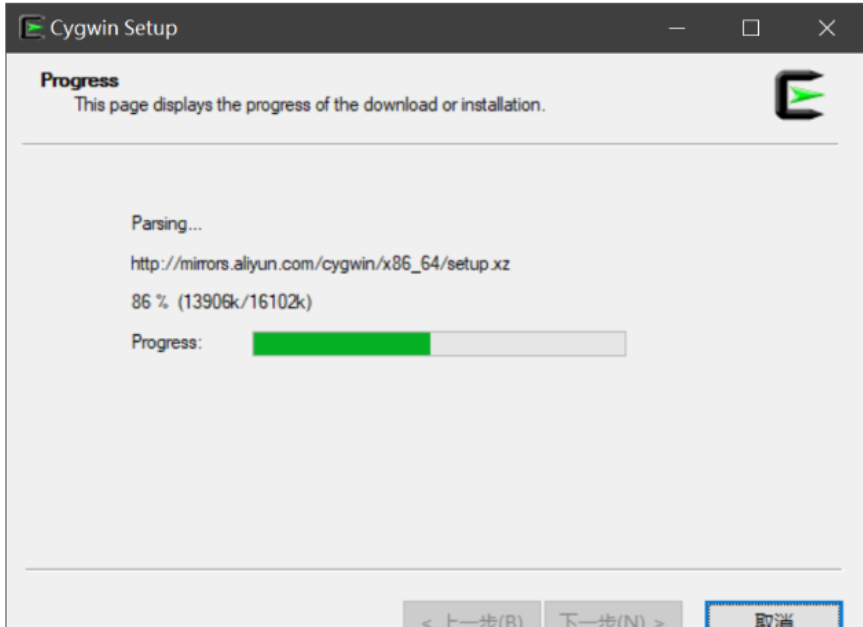
**選擇下載站點**
不同的鏡像存放了不同的包,為了獲得最快的下載速度,我們可以添加網易開源鏡像`http://mirrors.163.com/cygwin/`或者 阿里云鏡像`http://mirrors.aliyun.com/cygwin/`

**開始自動搜索**
**選擇需要下載安裝的組件包**
這一步比較重要,為了之后更好的使用該軟件,建議自己在這里的時候就選好需要使用的組件,或者說支持的命令。
最核心的,記住一定要安裝Devel這個部分的模塊,其中包含了各種開發所用到的工具或模塊。
***下面推薦推幾個組件***
* fish:一個shell,具有良好的交互提示,強烈建議安裝,后面的操作也和其相關
* lynx:命令安裝組件的必須工具,強烈推薦安裝此項,方便之后擴展命令
* 其他的自選,比如 gcc,curl,python,tclsh等。學習FPGA,建議安裝tclsh
**組件可以在search框輸入后搜索,然后選中組件,在new列雙擊,當看到版本號后,安裝就會將此組件安裝上。**

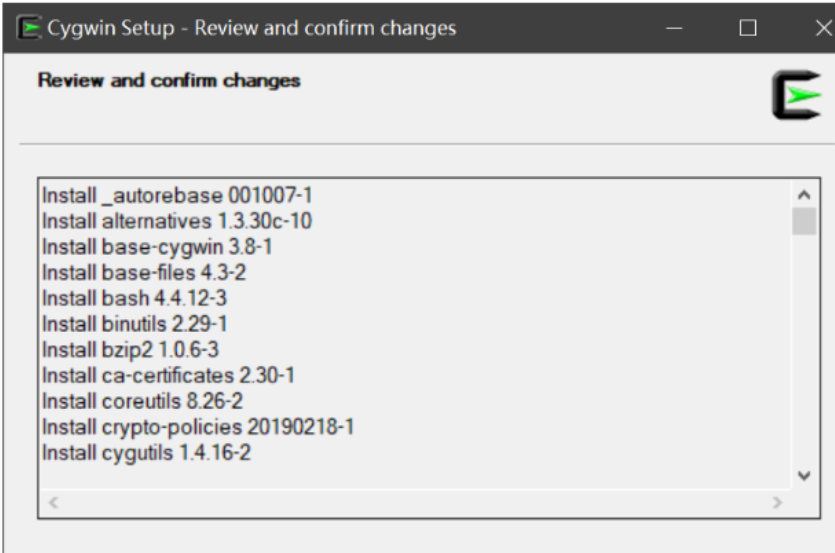
**確認并開始安裝**
**安裝好之后,將cygwin安裝路徑下的bin目錄添加到環境變量,方便使用**
**為了讓我們更舒服的使用,我們先把默認的shell設為fish,當然,若果沒安裝fish就算了**
當我們沒配置fish shell,使用默認的shell時我們打開`cygwin`的終端是這樣的
在終端輸入以下命令后下次重啟就可以了。
```
echo "fish" >> /etc/profile
```
當然此時要直接切換到fish可以在終端直接輸入`fish`,切換過來就是這樣的了:

## step2:安裝verilog小巧的仿真工具-iverilog
下載鏈接:[windows版本iverilog](http://bleyer.org/icarus/)
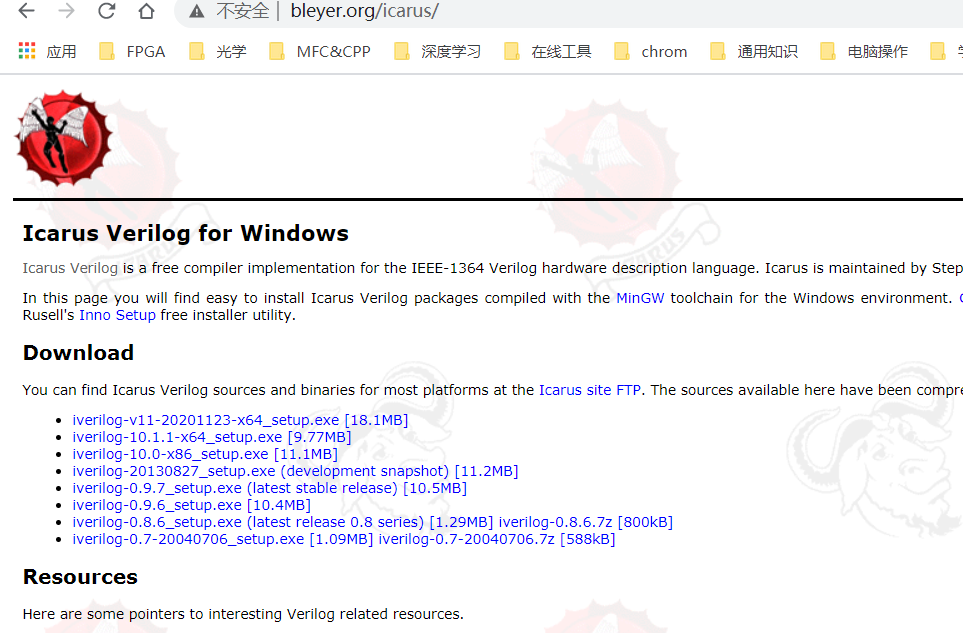
下載后直接安裝,當然為了之后使用方便強烈建議安裝好將安裝路徑下的`bin`目錄和安裝目錄下的`gtkwave/bin`目錄加入環境變量。
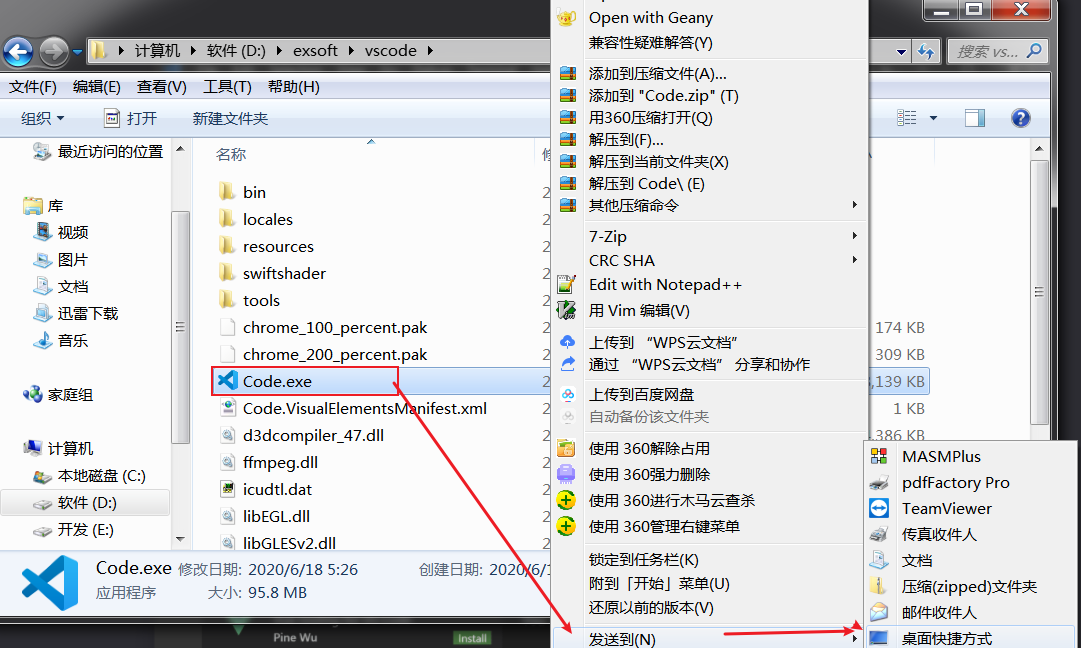
## step3:主要工具準備完畢,在隨意來個編輯器
編輯器在這里推薦使用`vscode`,后面的說明也都會基于這個編輯器。
下載鏈接:[vscode官網](https://code.visualstudio.com/)
注意,記住你的安裝路徑,
我們打開他,同樣為了方便使用,在這里先對其進行簡單的配置:
**首先安裝幾個必要的插件**

在這個里面搜索,為了支持中文,你可以搜索`chinese`,進行安裝,之后又就是中文顯示了。其他的插件可以暫時不用安裝,之后遇到相應的文件后,軟件會自動推薦你安裝,我安裝的插件如下:

**關鍵步驟**

在搜索框搜索`term`
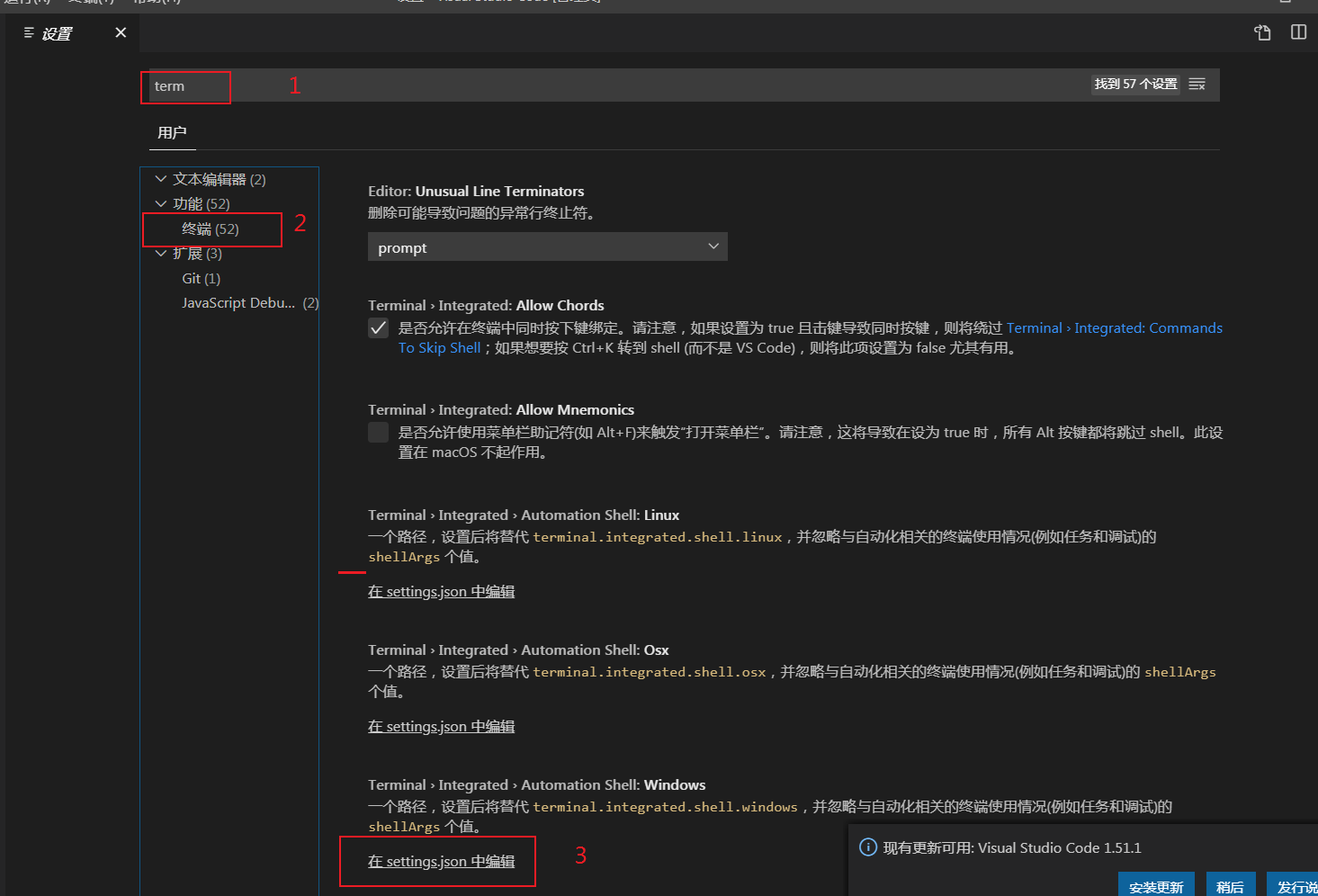
然后配置一下:
主要就是這幾個,大家最好把這幾項先配置好,省的之后一項一項配置。
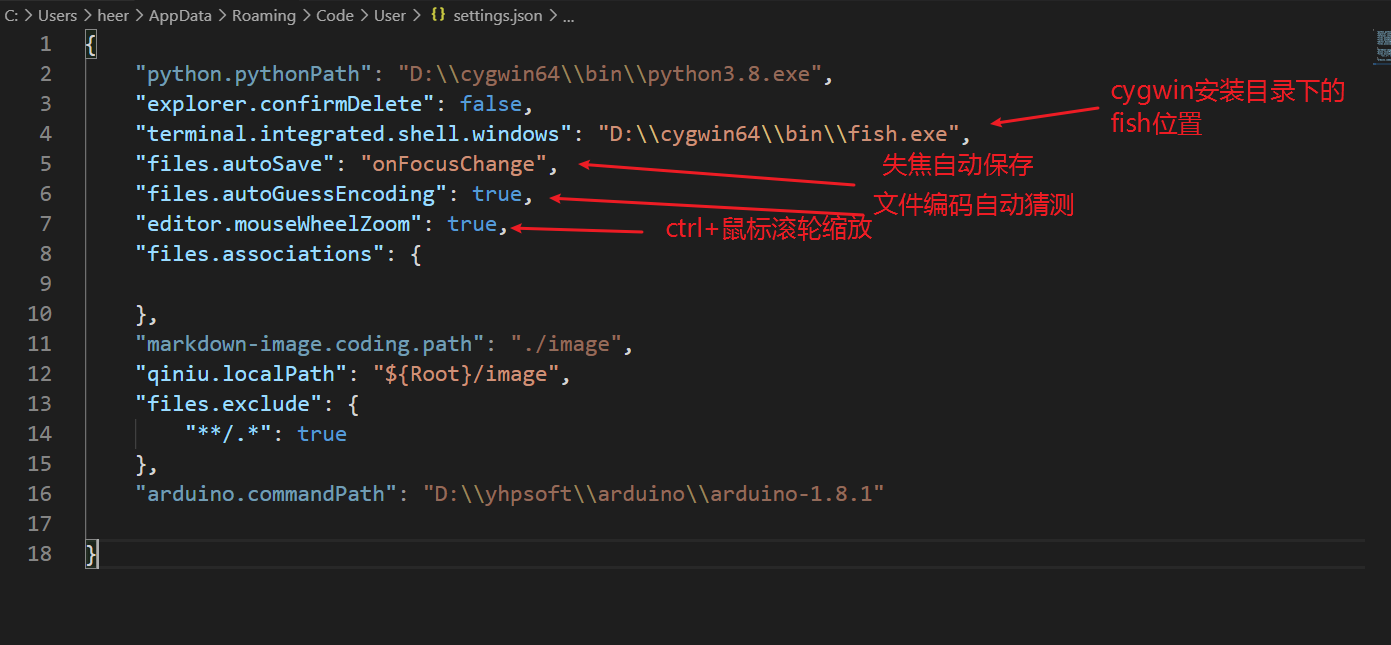
```
{
"terminal.integrated.shell.windows": "D:\\cygwin64\\bin\\fish.exe",
"files.autoSave": "onFocusChange",
"files.autoGuessEncoding": true,
"editor.mouseWheelZoom": true
}
```
> # 下載mini-mcu
下載地址:[mini-mcu](https://gitee.com/yuan_hp/mini-mcu)
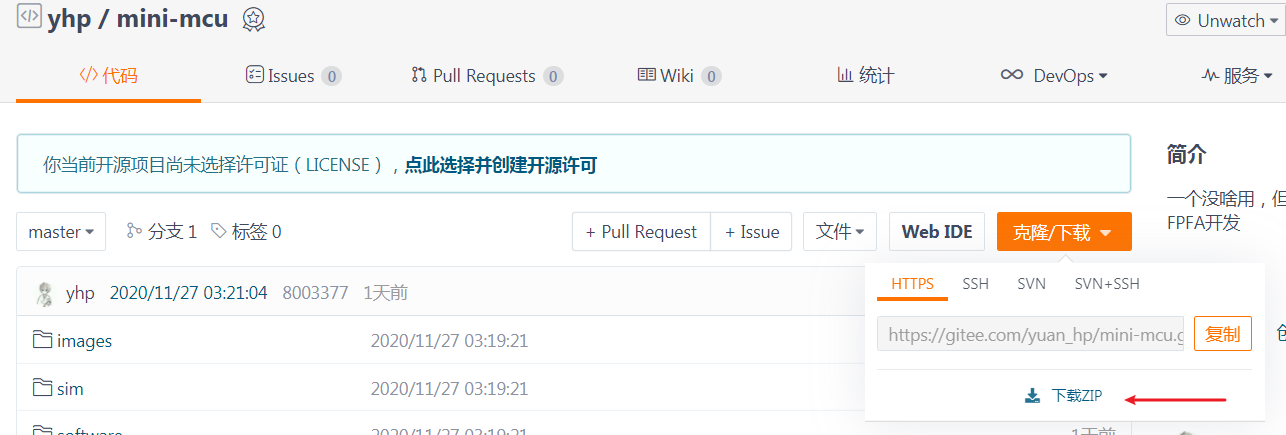
如果你安裝cygwin時也安裝了git,那么在cygwin的終端中可以使用:
```
git clone https://gitee.com/yuan_hp/mini-mcu.git
```
直接克隆。
然后我們使用`vscode`打開我們`mini-mcu`的文件夾,并在打開vscode的終端。
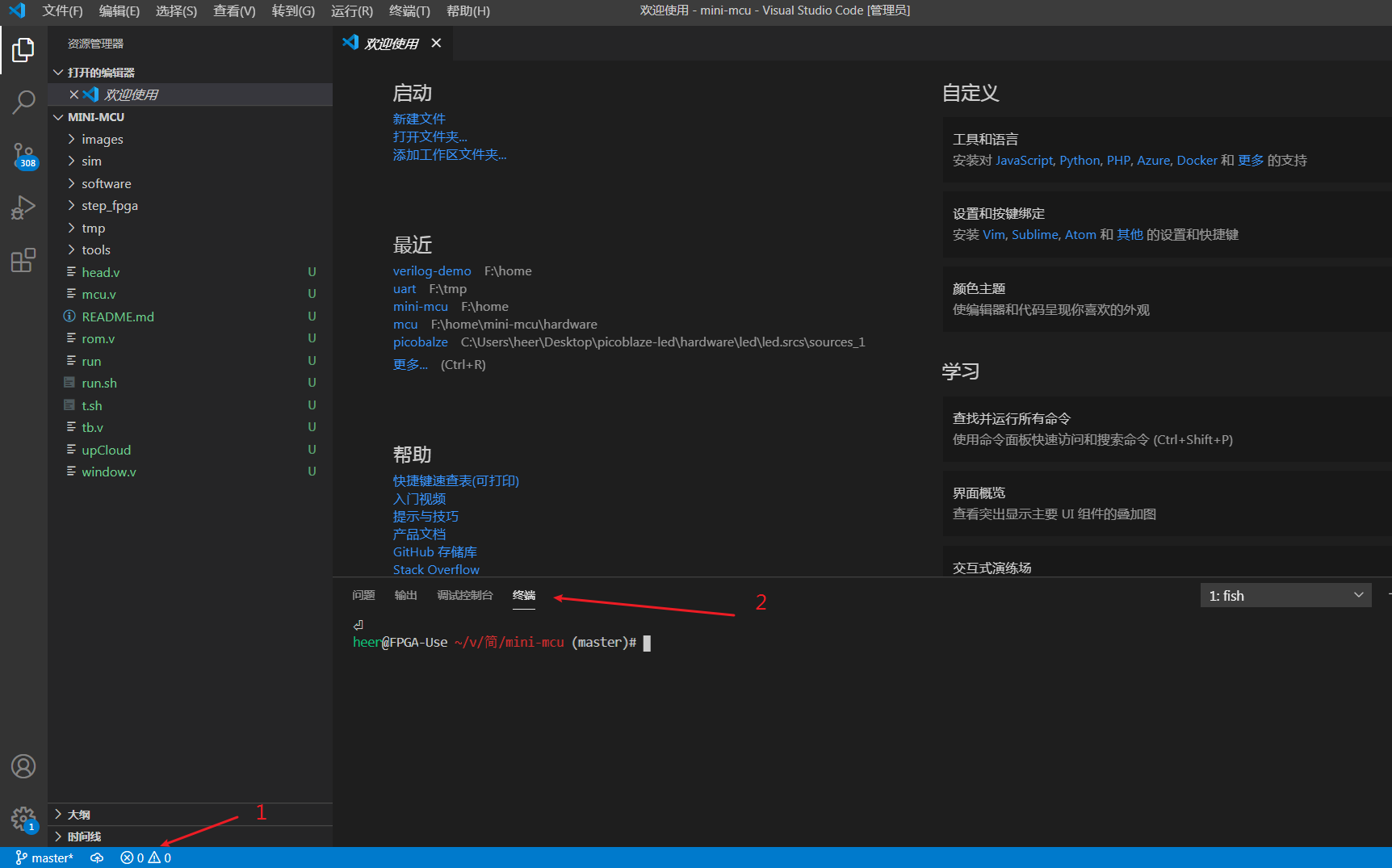
為了感受一下之后開發的方便,在終端中輸入以下命令:
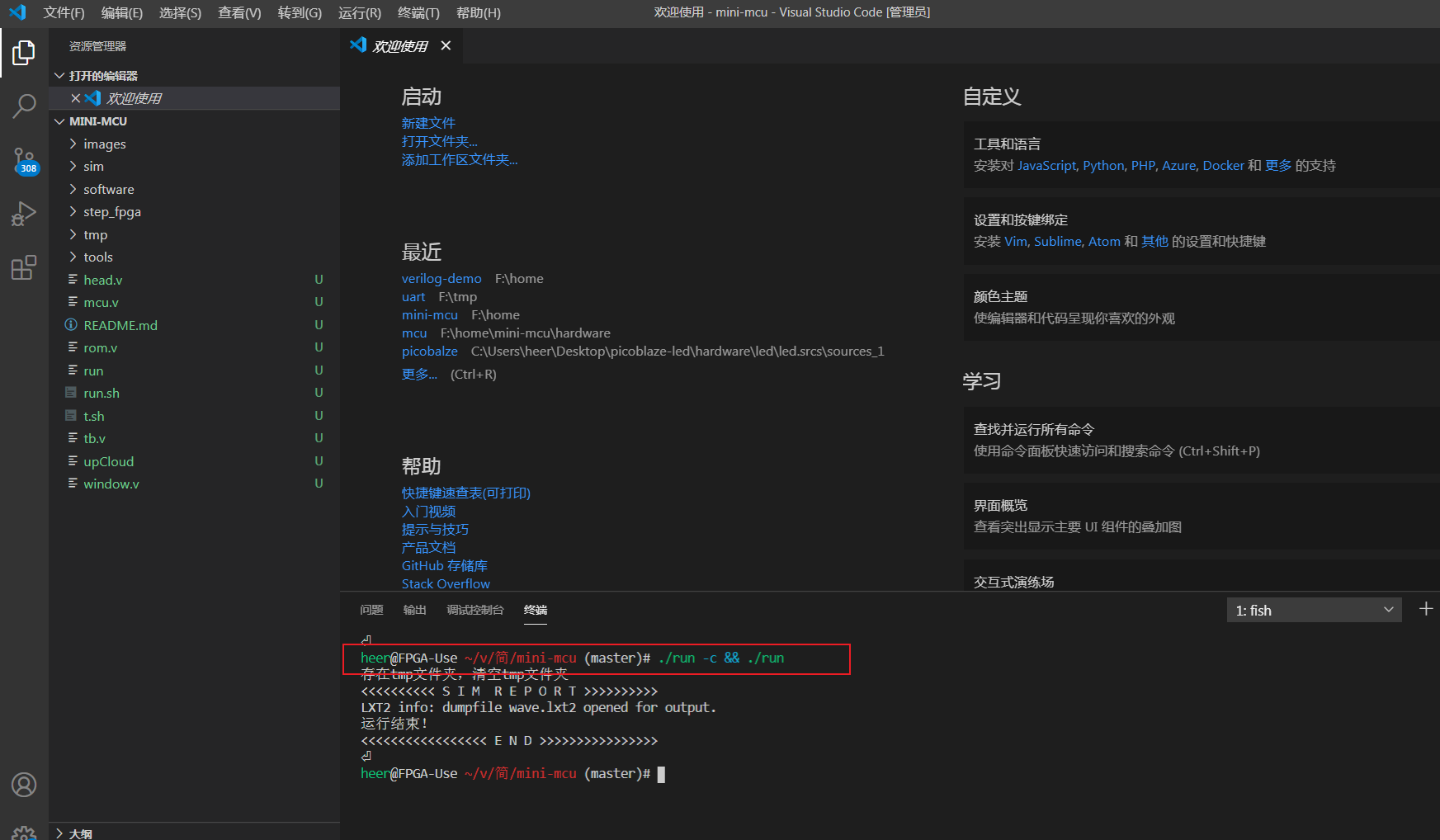
該命令行會直接編譯項目中`software`一級目錄下的`.psm`文件,也就是我們的匯編代碼文件,并生成對用的`rom.v`文件,同時裁剪`mini-mcu`,命令`./run`將會調用`iverilog`仿真項目并用`gtkwave`代開仿真的波形圖
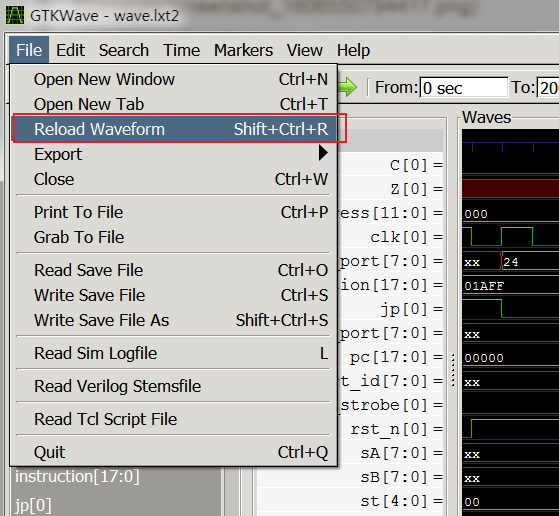
**特別注意:**當你想開發新的功能時,你可以先不關閉gtkwave,修改`software`下的代碼后,執行以下命令

刷新并行文件的數據,然后在gtkwave重新加載數據:
> # 項目文件結構
```
├── head.v
用于裁剪mini-mcu的宏文件
├── images
存放著圖片
├── mcu.v
mini-mcu源碼
├── README.md
├── rom.v
編譯匯編自動成成的程序存儲器
├── run
項目控制腳本
├── run.sh
├── sim
生成的仿真文件
│ ├── wave
│ └── wave.lxt2
├── software
編寫的匯編代碼
│ ├── test.psm
腳本會編譯的代碼
│ ├── 第一個例子
│ │ └── start.psm
│ ├── 簡單按鍵檢測
│ │ └── keycheck.psm
│ ├── 流水燈程序
│ │ └── led_water.psm
│ └── 數碼管計數
│ └── seg_counter.psm
├── step_fpga
小腳丫fpga的歷程項目,執行 ./run -g 會將文件拷貝到這個目錄下
├── tb.v
仿真testbech文件
├── tmp
執行腳本時生成的臨時文件夾
│ ├── kcpsm6.exe
│ ├── KCPSM6_session_log.txt
│ ├── ROM_form.v
│ ├── test.fmt
│ ├── test.hex
│ ├── test.log
│ ├── test.psm
│ └── test.v
├── tools
仿真一些工具和腳本
│ ├── bin
│ │ ├── compile
│ │ ├── hex2rom
│ │ └── msim
│ └── kcpsm
│ ├── kcpsm6.exe
│ └── ROM_form.v
├── upCloud
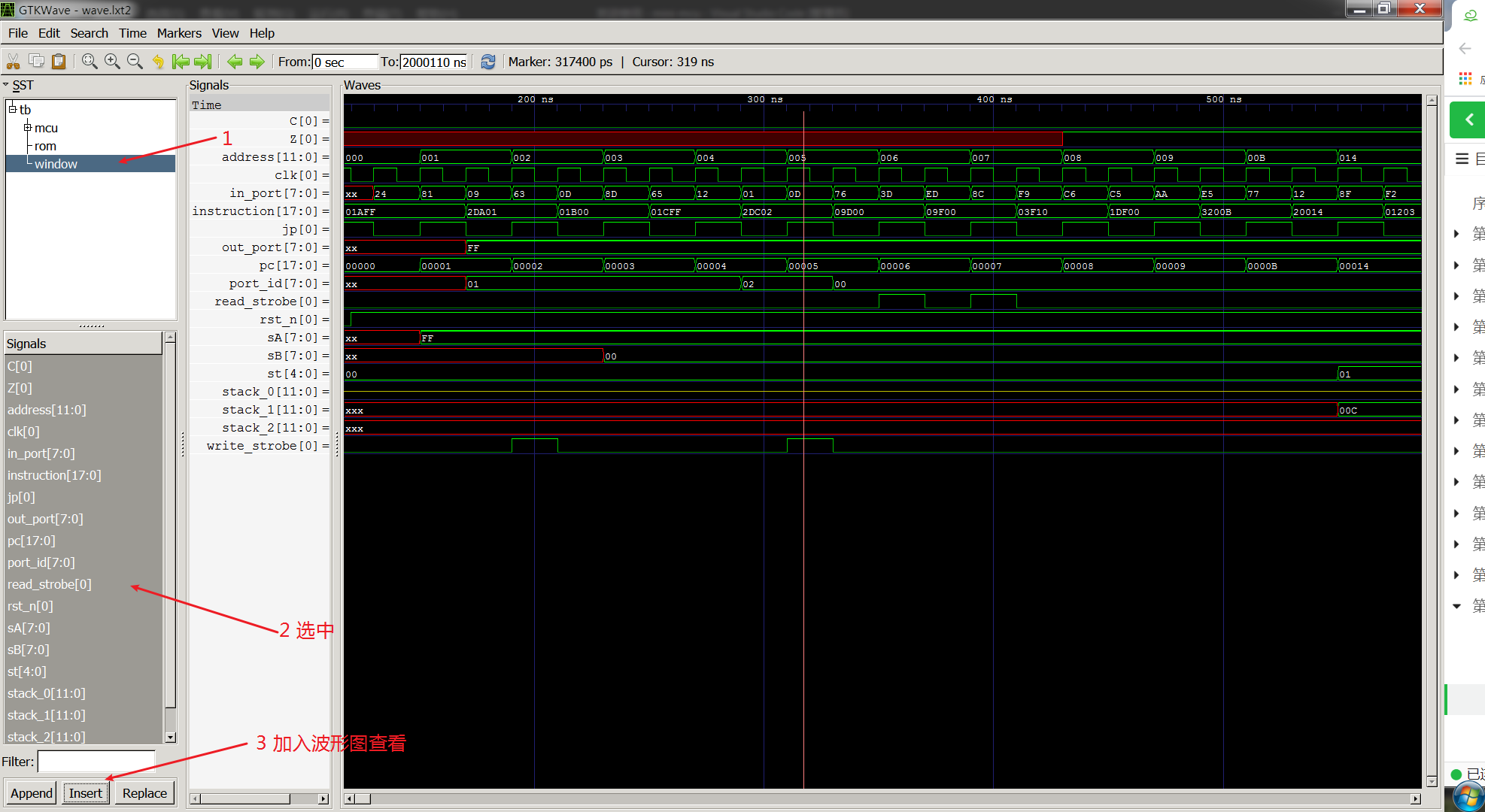
└── window.v 專門用來查看mcu內部變量的模塊
```
> # 已經支持的指令
* LOAD
* JUMP
* JUMP C
* JUMP NC
* JUMP Z
* JUMP NZ
* CALL C
* CALL NC
* CALL Z
* CALL NZ
* CALL
* RETURN
* RETURN C
* RETURN NC
* RETURN Z
* RETURN NZ
* AND
* OR
* XOR
* INPUT
* OUTPUT
* ADD
* ADDCY
* SUB
* SYBCY
* COMPARE
* TEST
* SL0
* SL1
* RL
* RR
* SR0
* SR1
* SLA
* SRA
* ENABLE INTERRUPT
* DISABEL INTERRUPT
* RETURNI
* JUMP @(sX,sY)
* CALL @(sX,sY)
> # 開發你的項目
## step1:編寫代碼
腳本只會自動搜索`software`一級目錄下的`.psm`文件!
```
start:
????LOAD?sA?,?23;?加載寄存器A的值為?0x23
ADDsA,02;寄存區A的值加上?0x02
```
## step2:編譯
執行命令`./run -c`編譯文件

## step3:仿真verilog項目
執行命令:`./run`

## step4:板上驗證
拷貝項目目錄下的`mcu.v, rom.v , head.v`到實際的FPGA實際項目的目錄下,進行,并編寫項目的頂層文件:參考如下:
```
module top
(
input clk_in, //輸入系統12MHz時鐘
//4bit撥碼開關輸入
input [3:0] sw,
input [3:0] key, //按鍵輸入
//數碼管
output [8:0] seg_led_1,
output [8:0] seg_led_2,
//rgb
output reg[2:0]rgb,
//led
output led1,
output led2,
output led3,
output led4,
output led5,
output led6,
output led7,
output led8
);
wire clk ,clko,rst;
reg [7:0] out;
assign {led8,led7,led6,led5,led4,led3,led2,led1} = out;
assign clk = clk_in;
reg rst_n_in; //復位信號
reg [17:0]cnt ;
always @(posedge clk) begin
if(cnt>=18'h3ffff)begin
rst_n_in <= 1'b1;
end else begin
cnt <= cnt +1;
rst_n_in <= 0;
end
end
/*
divide #(
.N(1)
) u1 (
.clk(clko),
.rst_n(rst_n_in),
.clkout(clk)
);
*/
//----------- mini-mcu 相關------------
wire [11:0]address;
wire [17:0] instruction;
wire bram_enable, read_strobe, write_strobe;
reg [7:0] in_port;
wire [7:0] port_id, out_port;
//----------- 數碼管 相關------------
reg[3:0] seg_data_1, seg_data_2;
//輸出引腳
always @(posedge clk )begin
if(write_strobe)begin
case(port_id)
8'h00:{seg_data_1,seg_data_2} <= out_port;//bcd編碼的2個數碼管
8'h01:out <= out_port; //LED控制
8'h02:rgb <= out_port[2:0]; //rgb
default:out <=out;
endcase
end else out <= out;
end
//輸入引腳
always@(*)begin
if(read_strobe) begin
case(port_id)
8'h00: in_port = {key[3:0],sw[3:0]}; //按鍵 4bit撥碼開關輸入
endcase
end
end
/**********************************
* 例化mini-mcu
**********************************/
mcu mcu(
.clk(clk), //系統時鐘
.rst_n( rst_n_in), //復位 0 --> 復位
.address( address), //程序取址地址
.instruction( instruction), //指令輸入
.bram_enable( bram_enable), //程序rom使能 1-->使能
.in_port( in_port), //輸入口
.read_strobe( read_strobe), //輸入口使能
.port_id( port_id), //io口地址
.out_port( out_port), //輸出口
.write_strobe( write_strobe) //輸出口寫使能
);
rom rom(
.clk( clk),
.address( address), //程序取址地址
.instruction( instruction), //指令輸入
.enable( bram_enable) //程序rom使能 1-->使能
);
/**********************************
*數碼管顯示 是bcd碼
**********************************/
seg_display seg_display(
.seg_data_1(seg_data_1),
.seg_data_2(seg_data_2),
.seg_led_1(seg_led_1),
.seg_led_2(seg_led_2)
);
endmodule
```
> # 幾個實例
## 流水燈
```
;系統時鐘為倍頻到120MHz
;目標硬件為 小腳丫FPGA step-maxo2-c,這個型號是U盤模式,流文件會下載到mcu,每次上電由mcu配置FPGA
;輸入
constant sw_port,00 ;定義按鍵四段撥碼開關 【按鍵 : 開關 】
;輸出
constant seg_port,00 ;定義數碼管地址
constant led_port,01 ;定義led_port為常量01
constant rgb_port,02 ; rgb燈
start:
load sA,FE ; led等控制
load sB,12 ; 初始化數碼管顯示 12
load sC,00000111'b ; ' rgb 滅
output sC,rgb_port ;rgb不量
input sD,sw_port ; 讀一次io口
output sB, seg_port ;數碼管顯示
loop:
output sA, led_port ;流水燈實現
RL sA ;循環左移
call delay_500ms
jump loop ;循環
delay_500ms: LOAD s2, 09 ; 500000us / (1/1.2us) --> 計數次數
LOAD s1, 27
LOAD s0, c0
jump software_delay
software_delay: LOAD s0, s0 ;pad loop to make it 10 clock cycles (5 instructions), if clk 12MHz --> 1/1.2 us
SUB s0, 01
SUBCY s1, 00
SUBCY s2, 00
JUMP NZ, software_delay
RETURN
```
## 數碼管計數器
```
;系統時鐘為12MHz
;目標硬件為 小腳丫FPGA step-maxo2-c,這個型號是U盤模式,流文件會下載到mcu,每次上電由mcu配置FPGA
;輸入
constant sw_port,00 ;定義按鍵四段撥碼開關 【按鍵 : 開關 】
;輸出
constant seg_port,00 ;定義數碼管地址
constant led_port,01 ;定義led_port為常量01
constant rgb_port,02 ; rgb燈
start:
load sA,FF ; led等控制
output sA,led_port
load sB,00 ; 初始化數碼管顯示
load sC,00000111'b ; ' rgb 滅
output sC,rgb_port ;rgb不量
input sD,sw_port ; 讀一次io口
loop:
output sB, seg_port
ADD sB,01
load sE,sB ;
SL0 sE
SL0 sE
SL0 sE
SL0 sE
COMPARE sE,A0
CALL Z,carry ;越界進位
LOAD sE,sB
SR0 sE
SR0 sE
SR0 sE
SR0 sE
COMPARE sE,0A
CALL Z,clear ;滿了清零
call delay_500ms
jump loop ;循環
carry: ;bcd碼表示的低四位已經滿了,整體加6
ADD sB,06
RETURN
clear: ;到了99后,下一步歸零
LOAD sB,00
RETURN
delay_500ms: LOAD s2, 09 ; 500000us / (1/1.2us) --> 計數次數
LOAD s1, 27
LOAD s0, c0
jump software_delay
software_delay: LOAD s0, s0 ;pad loop to make it 10 clock cycles (5 instructions), if clk 12MHz --> 1/1.2 us
SUB s0, 01
SUBCY s1, 00
SUBCY s2, 00
JUMP NZ, software_delay
RETURN
```
## 8位乘法器
```
;系統時鐘為12MHz
;目標硬件為 小腳丫FPGA step-maxo2-c,這個型號是U盤模式,流文件會下載到mcu,每次上電由mcu配置FPGA
start:
load s0 , 0a ; 加載寄存器0的值
load s1,08 ; 寄存器1的值
call mult ; s0 * s1 => s2
wait:
jump wait
; 8位乘法 計算 s0 * s1 ==> s2
mult :
load s2,00
mult_loop:
add s2,s0
sub s1,01
jump nz,mult_loop
return
;16位乘法 [s1,s0] * [s3,s2] => [s5,s4]
mult16 :
load s5,00
load s4,00
mult16_loop:
add s4,s2
addcy s5,s3
sub s0,01
subcy s1,00
jump nz,mult16_loop
return
```
> # 個人實驗開發板
我做實驗的開發板為小腳丫FPGA,型號為`STEM-MX02-C`,這是U盤模式的,芯片為Lattice的,項目下已經有對應的工程,就是`step_fpga`,如果你的開發板也是這個,同時也安了diamond,也將diamond的可執行路徑加入了環境變量,那么可以執行命令`./run -g`,就會編譯代碼,拷貝文件,綜合工程,下載到開發板了,你可能需要修改的是在`step_fpga`下的`run.tcl`腳本的最后一行。

`pnmainc`是diamond工具的tcl命令工具!
> # 總結
個人水平有限,中斷部分過段時間在添加,對于實現簡單傳感器的采集,已經足夠用了,導師抓得緊,牙縫里擠出的時間寫的這個小項目,收獲了很多,現在這個項目只是模型,之后會逐步完善!
- 序
- 第1章 Linux下開發FPGA
- 1.1 Linux下安裝diamond
- 1.2 使用輕量級linux仿真工具iverilog
- 1.3 使用linux shell來讀寫串口
- 1.4 嵌入式上的linux
- 設備數教程
- linux C 標準庫文檔
- linux 網絡編程
- 開機啟動流程
- 1.5 linux上實現與樹莓派,FPGA等通信的串口腳本
- 第2章 Intel FPGA的使用
- 2.1 特別注意
- 2.2 高級應用開發流程
- 2.2.1 生成二進制bit流rbf
- 2.2.2 制作Preloader Image
- 2.2.2.1 生成BSP文件
- 2.2.2.2 編譯preloader和uboot
- 2.2.2.3 更新SD的preloader和uboot
- 2.3 HPS使用
- 2.3.1 通過JTAG下載代碼
- 2.3.2 HPS軟件部分開發
- 2.3 quartus中IP核的使用
- 2.3.1 Intel中RS232串口IP的使用
- 2.4 一些問題的解決方法
- 2.4.1 關于引腳的復用的綜合出錯
- 第3章 關于C/C++的一些語法
- 3.1 C中數組作為形參不傳長度
- 3.2 匯編中JUMP和CALL的區別
- 3.3 c++中map的使用
- 3.4 鏈表的一些應用
- 3.5 vector的使用
- 3.6 使用C實現一個簡單的FIFO
- 3.6.1 循環隊列
- 3.7 C語言不定長參數
- 3.8 AD采樣計算同頻信號的相位差
- 3.9 使用C實現棧
- 3.10 增量式PID
- 第4章 Xilinx的FPGA使用
- 4.1 Alinx使用中的一些問題及解決方法
- 4.1.1 在Genarate Bitstream時提示沒有name.tcl
- 4.1.2 利用verilog求位寬
- 4.1.3 vivado中AXI寫DDR說明
- 4.1.4 zynq中AXI GPIO中斷問題
- 4.1.5 關于時序約束
- 4.1.6 zynq的PS端利用串口接收電腦的數據
- 4.1.7 SDK啟動出錯的解決方法
- 4.1.8 讓工具綜合是不優化某一模塊的方法
- 4.1.9 固化程序(雙核)
- 4.1.10 分配引腳時的問題
- 4.1.11 vivado仿真時相對文件路徑的問題
- 4.2 GCC使用Attribute分配空間給變量
- 4.3 關于Zynq的DDR寫入byte和word的方法
- 4.4 常用模塊
- 4.4.1 I2S接收串轉并
- 4.5 時鐘約束
- 4.5.1 時鐘約束
- 4.6 VIVADO使用
- 4.6.1 使用vivado進行仿真
- 4.7 關于PicoBlaze軟核的使用
- 4.8 vivado一些IP的使用
- 4.8.1 float-point浮點單元的使用
- 4.10 zynq的雙核中斷
- 第5章 FPGA的那些好用的工具
- 5.1 iverilog
- 5.2 Arduino串口繪圖器工具
- 5.3 LabVIEW
- 5.4 FPGA開發實用小工具
- 5.5 Linux下繪制時序圖軟件
- 5.6 verilog和VHDL相互轉換工具
- 5.7 linux下搭建輕量易用的verilog仿真環境
- 5.8 VCS仿真verilog并查看波形
- 5.9 Verilog開源的綜合工具-Yosys
- 5.10 sublim text3編輯器配置verilog編輯環境
- 5.11 在線工具
- 真值表 -> 邏輯表達式
- 5.12 Modelsim使用命令仿真
- 5.13 使用TCL實現的個人仿真腳本
- 5.14 在cygwin下使用命令行下載arduino代碼到開發板
- 5.15 STM32開發
- 5.15.1 安裝Atollic TrueSTUDIO for STM32
- 5.15.2 LED閃爍吧
- 5.15.3 模擬U盤
- 第6章 底層實現
- 6.1 硬件實現加法的流程
- 6.2 硬件實現乘法器
- 6.3 UART實現
- 6.3.1 通用串口發送模塊
- 6.4 二進制數轉BCD碼
- 6.5 基本開源資源
- 6.5.1 深度資源
- 6.5.2 FreeCore資源集合
- 第7章 常用模塊
- 7.1 溫濕度傳感器DHT11的verilog驅動
- 7.2 DAC7631驅動(verilog)
- 7.3 按鍵消抖
- 7.4 小腳丫數碼管顯示
- 7.5 verilog實現任意人數表決器
- 7.6 基本模塊head.v
- 7.7 四相八拍步進電機驅動
- 7.8 單片機部分
- 7.8.1 I2C OLED驅動
- 第8章 verilog 掃盲區
- 8.1 時序電路中數據的讀寫
- 8.2 從RTL角度來看verilog中=和<=的區別
- 8.3 case和casez的區別
- 8.4 關于參數的傳遞與讀取(paramter)
- 8.5 關于符號優先級
- 第9章 verilog中的一些語法使用
- 9.1 可綜合的repeat
- 第10章 system verilog
- 10.1 簡介
- 10.2 推薦demo學習網址
- 10.3 VCS在linux上環境的搭建
- 10.4 deepin15.11(linux)下搭建system verilog的vcs仿真環境
- 10.5 linux上使用vcs寫的腳本仿真管理
- 10.6 system verilog基本語法
- 10.6.1 數據類型
- 10.6.2 枚舉與字符串
- 第11章 tcl/tk的使用
- 11.1 使用Tcl/Tk
- 11.2 tcl基本語法教程
- 11.3 Tk的基本語法
- 11.3.1 建立按鈕
- 11.3.2 復選框
- 11.3.3 單選框
- 11.3.4 標簽
- 11.3.5 建立信息
- 11.3.6 建立輸入框
- 11.3.7 旋轉框
- 11.3.8 框架
- 11.3.9 標簽框架
- 11.3.10 將窗口小部件分配到框架/標簽框架
- 11.3.11 建立新的上層窗口
- 11.3.12 建立菜單
- 11.3.13 上層窗口建立菜單
- 11.3.14 建立滾動條
- 11.4 窗口管理器
- 11.5 一些學習的腳本
- 11.6 一些常用的操作語法實現
- 11.6.1 刪除同一后綴的文件
- 11.7 在Lattice的Diamond中使用tcl
- 第12章 FPGA的重要知識
- 12.1 面積與速度的平衡與互換
- 12.2 硬件原則
- 12.3 系統原則
- 12.4 同步設計原則
- 12.5 乒乓操作
- 12.6 串并轉換設計技巧
- 12.7 流水線操作設計思想
- 12.8 數據接口的同步方法
- 第13章 小項目
- 13.1 數字濾波器
- 13.2 FIFO
- 13.3 一個精簡的CPU( mini-mcu )
- 13.3.1 基本功能實現
- 13.3.2 中斷添加
- 13.3.3 使用中斷實現流水燈(實際硬件驗證)
- 13.3.4 綜合一點的應用示例
- 13.4.5 使用flex開發匯編編譯器
- 13.4.5 linux--Flex and Bison
- 13.4 有符號數轉單精度浮點數
- 13.5 串口調試FPGA模板