
# 10.11 傳感器專題(2)——方向傳感器
## 本節引言:
在上一節中我們中我們對傳感器的一些基本概念進行了學習,以及學習了使用傳感器的套路, 本節給大家帶來的傳感器是方向傳感器的用法,好的,開始本節內容~
## 1.三維坐標系的概念:
在Android平臺中,傳感器框架通常是使用一個標準的三維坐標系來表示一個值的。以本節 要講的方向傳感器為例子,確定一個方向也需要一個三維坐標,畢竟我們的設備不可能永遠 都是水平端著的吧,安卓給我們返回的方向值就是一個長度為3的flaot數組,包含三個方向 的值!官方API文檔中有這樣一個圖:[sensors_overview](http://androiddoc.qiniudn.com/guide/topics/sensors/sensors_overview.html)
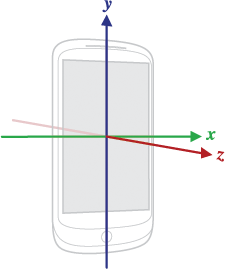
如果你看不懂圖,那么寫下文字解釋:
* **X軸的方向**:沿著屏幕水平方向從左到右,如果手機如果不是是正方形的話,較短的邊需要水平 放置,較長的邊需要垂直放置。
* **Y軸的方向**:從屏幕的左下角開始沿著屏幕的的垂直方向指向屏幕的頂端
* **Z軸的方向**:當水平放置時,指向天空的方向
## 2.方向傳感器的三個值
上一節中說了,傳感器的回調方法:onSensorChanged中的參數SensorEvent event,event的 值類型是Float[]的,而且最多只有三個元素,而方向傳感器則剛好有三個元素,都表示度數! 對應的含義如下:
**values[0]:**方位角,手機繞著Z軸旋轉的角度。0表示正北(North),90表示正東(East), 180表示正南(South),270表示正西(West)。假如values[0]的值剛好是這四個值的話, 并且手機沿水平放置的話,那么當前手機的正前方就是這四個方向,可以利用這一點來 寫一個指南針!
**values[1**]:傾斜角,手機翹起來的程度,當手機繞著x軸傾斜時該值會發生變化。取值 范圍是[-180,180]之間。假如把手機放在桌面上,而桌面是完全水平的話,values[1](http://androiddoc.qiniudn.com/guide/topics/sensors/sensors_overview.html)的則應該 是0,當然很少桌子是絕對水平的。從手機**頂部開始抬起**,直到手機沿著x軸旋轉180(此時屏幕 鄉下水平放在桌面上)。在這個旋轉過程中,values[**1**]的值會從**0到-180**之間變化,即手機抬起 時,values[1](http://androiddoc.qiniudn.com/guide/topics/sensors/sensors_overview.html)的值會逐漸變小,知道等于-180;而加入從手機**底部開始抬起**,直到手機沿著x軸 旋轉180度,此時values[**1**]的值會**從0到180**之間變化。我們可以利用value[**1**]的這個特性結合 value[**2**]來實現一個平地尺!
**value[2**]:滾動角,沿著Y軸的滾動角度,取值范圍為:[-90,90],假設將手機屏幕朝上水平放在 桌面上,這時如果桌面是平的,values[2](http://www.runoob.com/wp-content/uploads/2015/11/18139494.jpg)的值應為0。將手機從左側逐漸抬起,values[**2**]的值將 逐漸減小,知道垂直于手機放置,此時values[**2**]的值為-90,從右側則是0-90;加入在垂直位置 時繼續向右或者向左滾動,values[**2**]的值將會繼續在-90到90之間變化!
假如你不是很懂,沒事我們寫個demo驗證下就知道了~
## 3.簡單的Demo幫助我們理解這三個值的變化:
**運行效果圖**:
**實現代碼**:
布局代碼:**activity_main.xml**:
```
<LinearLayout xmlns:android="http://schemas.android.com/apk/res/android"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:orientation="vertical"
android:padding="5dp">
<TextView
android:id="@+id/tv_value1"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_marginTop="10dp"
android:text="方位角"
android:textSize="18sp"
android:textStyle="bold" />
<TextView
android:id="@+id/tv_value2"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_marginTop="10dp"
android:text="傾斜角"
android:textSize="18sp"
android:textStyle="bold" />
<TextView
android:id="@+id/tv_value3"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_marginTop="10dp"
android:text="滾動角"
android:textSize="18sp"
android:textStyle="bold" />
</LinearLayout>
```
**MainActivity.java**:
```
public class MainActivity extends AppCompatActivity implements SensorEventListener {
private TextView tv_value1;
private TextView tv_value2;
private TextView tv_value3;
private SensorManager sManager;
private Sensor mSensorOrientation;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
sManager = (SensorManager) getSystemService(SENSOR_SERVICE);
mSensorOrientation = sManager.getDefaultSensor(Sensor.TYPE_ORIENTATION);
sManager.registerListener(this, mSensorOrientation, SensorManager.SENSOR_DELAY_UI);
bindViews();
}
private void bindViews() {
tv_value1 = (TextView) findViewById(R.id.tv_value1);
tv_value2 = (TextView) findViewById(R.id.tv_value2);
tv_value3 = (TextView) findViewById(R.id.tv_value3);
}
@Override
public void onSensorChanged(SensorEvent event) {
tv_value1.setText("方位角:" + (float) (Math.round(event.values[0] * 100)) / 100);
tv_value2.setText("傾斜角:" + (float) (Math.round(event.values[1] * 100)) / 100);
tv_value3.setText("滾動角:" + (float) (Math.round(event.values[2] * 100)) / 100);
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
}
}
```
代碼非常簡單~,你想真正體驗下這三個值的變化,自己運行下程序轉轉手機就知道了~
## 4.一個簡易版的文字指南針示例
下面我們來寫個簡單的文字版的指南針來體驗體驗,當文字顯示正南的時候,表示手機 的正前方就是南方!
**運行效果圖**:
**代碼實現**:
自定義View:**CompassView.java**
```
/**
* Created by Jay on 2015/11/14 0014.
*/
public class CompassView extends View implements Runnable{
private Paint mTextPaint;
private int sWidth,sHeight;
private float dec = 0.0f;
private String msg = "正北 0°";
public CompassView(Context context) {
this(context, null);
}
public CompassView(Context context, AttributeSet attrs) {
super(context, attrs);
sWidth = ScreenUtil.getScreenW(context);
sHeight = ScreenUtil.getScreenH(context);
init();
new Thread(this).start();
}
public CompassView(Context context, AttributeSet attrs, int defStyleAttr) {
super(context, attrs, defStyleAttr);
}
private void init() {
mTextPaint = new Paint();
mTextPaint.setColor(Color.GRAY);
mTextPaint.setTextSize(64);
mTextPaint.setStyle(Paint.Style.FILL);
}
@Override
protected void onDraw(Canvas canvas) {
super.onDraw(canvas);
canvas.drawText(msg, sWidth / 4 , sWidth / 2, mTextPaint);
}
// 更新指南針角度
public void setDegree(float degree)
{
// 設置靈敏度
if(Math.abs(dec - degree) >= 2 )
{
dec = degree;
int range = 22;
String degreeStr = String.valueOf(dec);
// 指向正北
if(dec > 360 - range && dec < 360 + range)
{
msg = "正北 " + degreeStr + "°";
}
// 指向正東
if(dec > 90 - range && dec < 90 + range)
{
msg = "正東 " + degreeStr + "°";
}
// 指向正南
if(dec > 180 - range && dec < 180 + range)
{
msg = "正南 " + degreeStr + "°";
}
// 指向正西
if(dec > 270 - range && dec < 270 + range)
{
msg = "正西 " + degreeStr + "°";
}
// 指向東北
if(dec > 45 - range && dec < 45 + range)
{
msg = "東北 " + degreeStr + "°";
}
// 指向東南
if(dec > 135 - range && dec < 135 + range)
{
msg = "東南 " + degreeStr + "°";
}
// 指向西南
if(dec > 225 - range && dec < 225 + range)
{
msg = "西南 " + degreeStr + "°";
}
// 指向西北
if(dec > 315 - range && dec < 315 + range)
{
msg = "西北 " + degreeStr + "°";
}
}
}
@Override
public void run() {
while(!Thread.currentThread().isInterrupted())
{
try
{
Thread.sleep(100);
}
catch(InterruptedException e)
{
Thread.currentThread().interrupt();
}
postInvalidate();
}
}
}
```
**MainActivity.java**:
```
public class MainActivity extends AppCompatActivity implements SensorEventListener {
private CompassView cView;
private SensorManager sManager;
private Sensor mSensorOrientation;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
cView = new CompassView(MainActivity.this);
sManager = (SensorManager) getSystemService(SENSOR_SERVICE);
mSensorOrientation = sManager.getDefaultSensor(Sensor.TYPE_ORIENTATION);
sManager.registerListener(this, mSensorOrientation, SensorManager.SENSOR_DELAY_UI);
setContentView(cView);
}
@Override
public void onSensorChanged(SensorEvent event) {
cView.setDegree(event.values[0]);
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
}
@Override
protected void onDestroy() {
super.onDestroy();
sManager.unregisterListener(this);
}
}
```
這就是一個很簡單的指南針的雛形了,有興趣的可以自己繪制個羅盤和指針,然后實現一個 好看的指南針~
## 5.本節示例代碼下載:
[SensorDemo2.zip](http://static.runoob.com/download/SensorDemo2.zip)
[SensorDemo3.zip](http://static.runoob.com/download/SensorDemo3.zip)
## 本節小結:
> 好的,本節給大家介紹了Android中最常用的方向傳感器,以及他的簡單用法,以及 寫了一個指南針的例子,而完成指南針我們只用到一個values[0]的值,利用其他兩個 值我們還可以用來測量某地是否平躺,即制作水平尺,有空的可以寫個來玩玩~ 好的,就到這里,謝謝~
- 1.0 Android基礎入門教程
- 1.0.1 2015年最新Android基礎入門教程目錄
- 1.1 背景相關與系統架構分析
- 1.2 開發環境搭建
- 1.2.1 使用Eclipse + ADT + SDK開發Android APP
- 1.2.2 使用Android Studio開發Android APP
- 1.3 SDK更新不了問題解決
- 1.4 Genymotion模擬器安裝
- 1.5.1 Git使用教程之本地倉庫的基本操作
- 1.5.2 Git之使用GitHub搭建遠程倉庫
- 1.6 .9(九妹)圖片怎么玩
- 1.7 界面原型設計
- 1.8 工程相關解析(各種文件,資源訪問)
- 1.9 Android程序簽名打包
- 1.11 反編譯APK獲取代碼&資源
- 2.1 View與ViewGroup的概念
- 2.2.1 LinearLayout(線性布局)
- 2.2.2 RelativeLayout(相對布局)
- 2.2.3 TableLayout(表格布局)
- 2.2.4 FrameLayout(幀布局)
- 2.2.5 GridLayout(網格布局)
- 2.2.6 AbsoluteLayout(絕對布局)
- 2.3.1 TextView(文本框)詳解
- 2.3.2 EditText(輸入框)詳解
- 2.3.3 Button(按鈕)與ImageButton(圖像按鈕)
- 2.3.4 ImageView(圖像視圖)
- 2.3.5.RadioButton(單選按鈕)&Checkbox(復選框)
- 2.3.6 開關按鈕ToggleButton和開關Switch
- 2.3.7 ProgressBar(進度條)
- 2.3.8 SeekBar(拖動條)
- 2.3.9 RatingBar(星級評分條)
- 2.4.1 ScrollView(滾動條)
- 2.4.2 Date & Time組件(上)
- 2.4.3 Date & Time組件(下)
- 2.4.4 Adapter基礎講解
- 2.4.5 ListView簡單實用
- 2.4.6 BaseAdapter優化
- 2.4.7ListView的焦點問題
- 2.4.8 ListView之checkbox錯位問題解決
- 2.4.9 ListView的數據更新問題
- 2.5.0 構建一個可復用的自定義BaseAdapter
- 2.5.1 ListView Item多布局的實現
- 2.5.2 GridView(網格視圖)的基本使用
- 2.5.3 Spinner(列表選項框)的基本使用
- 2.5.4 AutoCompleteTextView(自動完成文本框)的基本使用
- 2.5.5 ExpandableListView(可折疊列表)的基本使用
- 2.5.6 ViewFlipper(翻轉視圖)的基本使用
- 2.5.7 Toast(吐司)的基本使用
- 2.5.8 Notification(狀態欄通知)詳解
- 2.5.9 AlertDialog(對話框)詳解
- 2.6.0 其他幾種常用對話框基本使用
- 2.6.1 PopupWindow(懸浮框)的基本使用
- 2.6.2 菜單(Menu)
- 2.6.3 ViewPager的簡單使用
- 2.6.4 DrawerLayout(官方側滑菜單)的簡單使用
- 3.1.1 基于監聽的事件處理機制
- 3.2 基于回調的事件處理機制
- 3.3 Handler消息傳遞機制淺析
- 3.4 TouchListener PK OnTouchEvent + 多點觸碰
- 3.5 監聽EditText的內容變化
- 3.6 響應系統設置的事件(Configuration類)
- 3.7 AnsyncTask異步任務
- 3.8 Gestures(手勢)
- 4.1.1 Activity初學乍練
- 4.1.2 Activity初窺門徑
- 4.1.3 Activity登堂入室
- 4.2.1 Service初涉
- 4.2.2 Service進階
- 4.2.3 Service精通
- 4.3.1 BroadcastReceiver牛刀小試
- 4.3.2 BroadcastReceiver庖丁解牛
- 4.4.2 ContentProvider再探——Document Provider
- 4.5.1 Intent的基本使用
- 4.5.2 Intent之復雜數據的傳遞
- 5.1 Fragment基本概述
- 5.2.1 Fragment實例精講——底部導航欄的實現(方法1)
- 5.2.2 Fragment實例精講——底部導航欄的實現(方法2)
- 5.2.3 Fragment實例精講——底部導航欄的實現(方法3)
- 5.2.4 Fragment實例精講——底部導航欄+ViewPager滑動切換頁面
- 5.2.5 Fragment實例精講——新聞(購物)類App列表Fragment的簡單實現
- 6.1 數據存儲與訪問之——文件存儲讀寫
- 6.2 數據存儲與訪問之——SharedPreferences保存用戶偏好參數
- 6.3.1 數據存儲與訪問之——初見SQLite數據庫
- 6.3.2 數據存儲與訪問之——又見SQLite數據庫
- 7.1.1 Android網絡編程要學的東西與Http協議學習
- 7.1.2 Android Http請求頭與響應頭的學習
- 7.1.3 Android HTTP請求方式:HttpURLConnection
- 7.1.4 Android HTTP請求方式:HttpClient
- 7.2.1 Android XML數據解析
- 7.2.2 Android JSON數據解析
- 7.3.1 Android 文件上傳
- 7.3.2 Android 文件下載(1)
- 7.3.3 Android 文件下載(2)
- 7.4 Android 調用 WebService
- 7.5.1 WebView(網頁視圖)基本用法
- 7.5.2 WebView和JavaScrip交互基礎
- 7.5.3 Android 4.4后WebView的一些注意事項
- 7.5.4 WebView文件下載
- 7.5.5 WebView緩存問題
- 7.5.6 WebView處理網頁返回的錯誤碼信息
- 7.6.1 Socket學習網絡基礎準備
- 7.6.2 基于TCP協議的Socket通信(1)
- 7.6.3 基于TCP協議的Socket通信(2)
- 7.6.4 基于UDP協議的Socket通信
- 8.1.1 Android中的13種Drawable小結 Part 1
- 8.1.2 Android中的13種Drawable小結 Part 2
- 8.1.3 Android中的13種Drawable小結 Part 3
- 8.2.1 Bitmap(位圖)全解析 Part 1
- 8.2.2 Bitmap引起的OOM問題
- 8.3.1 三個繪圖工具類詳解
- 8.3.2 繪圖類實戰示例
- 8.3.3 Paint API之—— MaskFilter(面具)
- 8.3.4 Paint API之—— Xfermode與PorterDuff詳解(一)
- 8.3.5 Paint API之—— Xfermode與PorterDuff詳解(二)
- 8.3.6 Paint API之—— Xfermode與PorterDuff詳解(三)
- 8.3.7 Paint API之—— Xfermode與PorterDuff詳解(四)
- 8.3.8 Paint API之—— Xfermode與PorterDuff詳解(五)
- 8.3.9 Paint API之—— ColorFilter(顏色過濾器)(1/3)
- 8.3.10 Paint API之—— ColorFilter(顏色過濾器)(2-3)
- 8.3.11 Paint API之—— ColorFilter(顏色過濾器)(3-3)
- 8.3.12 Paint API之—— PathEffect(路徑效果)
- 8.3.13 Paint API之—— Shader(圖像渲染)
- 8.3.14 Paint幾個枚舉/常量值以及ShadowLayer陰影效果
- 8.3.15 Paint API之——Typeface(字型)
- 8.3.16 Canvas API詳解(Part 1)
- 8.3.17 Canvas API詳解(Part 2)剪切方法合集
- 8.3.18 Canvas API詳解(Part 3)Matrix和drawBitmapMash
- 8.4.1 Android動畫合集之幀動畫
- 8.4.2 Android動畫合集之補間動畫
- 8.4.3 Android動畫合集之屬性動畫-初見
- 8.4.4 Android動畫合集之屬性動畫-又見
- 9.1 使用SoundPool播放音效(Duang~)
- 9.2 MediaPlayer播放音頻與視頻
- 9.3 使用Camera拍照
- 9.4 使用MediaRecord錄音
- 10.1 TelephonyManager(電話管理器)
- 10.2 SmsManager(短信管理器)
- 10.3 AudioManager(音頻管理器)
- 10.4 Vibrator(振動器)
- 10.5 AlarmManager(鬧鐘服務)
- 10.6 PowerManager(電源服務)
- 10.7 WindowManager(窗口管理服務)
- 10.8 LayoutInflater(布局服務)
- 10.9 WallpaperManager(壁紙管理器)
- 10.10 傳感器專題(1)——相關介紹
- 10.11 傳感器專題(2)——方向傳感器
- 10.12 傳感器專題(3)——加速度/陀螺儀傳感器
- 10.12 傳感器專題(4)——其他傳感器了解
- 10.14 Android GPS初涉
- 11.0《2015最新Android基礎入門教程》完結散花~