
# 4.4 Action
## 4.4.1 簡介
Actionlib是ROS中一個很重要的庫,類似service通信機制,actionlib也是一種請求響應機制的通信方式,actionlib主要彌補了service通信的一個不足,就是當機器人執行一個長時間的任務時,假如利用service通信方式,那么publisher會很長時間接受不到反饋的reply,致使通信受阻。當service通信不能很好的完成任務時候,actionlib則可以比較適合實現長時間的通信過程,actionlib通信過程可以隨時被查看過程進度,也可以終止請求,這樣的一個特性,使得它在一些特別的機制中擁有很高的效率。
## 4.4.2 通信原理
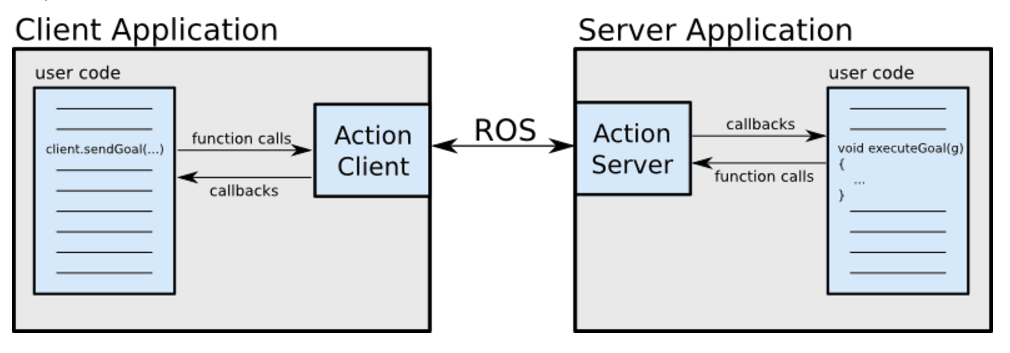
> Action的工作原理是client-server模式,也是一個雙向的通信模式。通信雙方在ROS Action Protocol下通過消息進行數據的交流通信。client和server為用戶提供一個簡單的API來請求目標(在客戶端)或通過函數調用和回調來執行目標(在服務器端)。
工作模式的結構示意圖如下:
通信雙方在ROS Action Protocal下進行交流通信是通過接口來實現,如下圖:
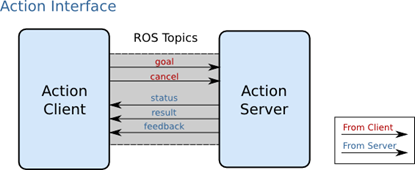
我們可以看到,客戶端會向服務器發送目標指令和取消動作指令,而服務器則可以給客戶端發送實時的狀態信息,結果信息,反饋信息等等,從而完成了service沒法做到的部分.
## 4.4.3 Action 規范
利用動作庫進行請求響應,動作的內容格式應包含三個部分,目標、反饋、結果。
* 目標
機器人執行一個動作,應該有明確的移動目標信息,包括一些參數的設定,方向、角度、速度等等。從而使機器人完成動作任務。
* 反饋
在動作進行的過程中,應該有實時的狀態信息反饋給服務器的實施者,告訴實施者動作完成的狀態,可以使實施者作出準確的判斷去修正命令。
* 結果
當運動完成時,動作服務器把本次運動的結果數據發送給客戶端,使客戶端得到本次動作的全部信息,例如可能包含機器人的運動時長,最終姿勢等等。
## 4.4.4 Action規范文件格式
Action規范文件的后綴名是.action,它的內容格式如下:
# Define the goal
uint32 dishwasher_id # Specify which dishwasher we want to use
---
# Define the result
uint32 total_dishes_cleaned
---
# Define a feedback message
float32 percent_complete
## 4.4.5 Action實例詳解
Actionlib是一個用來實現action的一個功能包集。我們在demo中設置一個場景,執行一個搬運的action,搬運過程中客戶端會不斷的發回反饋信息,最終完成整個搬運過程.
本小節的演示源碼在課程的演示代碼包里,[此處為鏈接](https://github.com/sychaichangkun/ROS-Academy-for-Beginners).
首先寫handling.action文件,類比如上的格式.包括三個部分,目標,結果,反饋.如下:
# Define the goal
uint32 handling_id
---
# Define the result
uint32 Handling_completed
---
# Define a feedback message
float32 percent_complete
寫完之后修改文件夾里CmakeLists.txt如下內容:
1. find_package(catkin REQUIRED genmsg actionlib_msgs actionlib)
2. add_action_files(DIRECTORY action FILES DoDishes.action) generate_messages(DEPENDENCIES actionlib_msgs)
3. add_action_files(DIRECTORY action FILES Handling.action)
4. generate_messages(
DEPENDENCIES
actionlib_msgs)
修改package.xml,添加所需要的依賴如下:
1. `<build_depend>actionlib </build_depend> `
2. `<build_depend>actionlib_msgs</build_depend>`
3. `<run_depend>actionlib</run_depend> `
4. `<run_depend>actionlib_msgs</run_depend>`
然后回到工作空間 `catkin_ws`進行編譯.
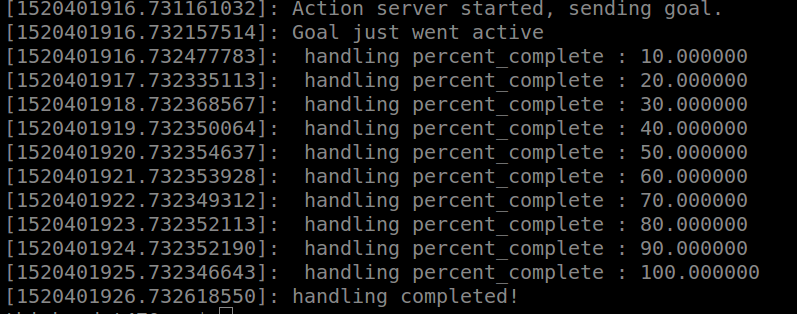
本例中設置的的action,定義了一個搬運的例子,首先寫客戶端,實現功能發送action請求,包括進行目標活動,或者目標活動.之后寫服務器,實驗返回客戶端活動當前狀態信息,結果信息,和反饋信息.從而實現action.本例測試結果截圖如下:



## 小結
至此,ROS通信架構的四種通信方式就介紹結束,我們可以對比學習這四種通信方式,去思考每一種通信的優缺點和適用條件,在正確的地方用正確的通信方式,這樣整個ROS的通信會更加高效,機器人也將更加的靈活和智能。機器人學會了通信,也就相當于有了“靈魂”。
- 前言
- 第一章 ROS簡介
- 機器人時代的到來
- ROS發展歷程
- 什么是ROS
- 安裝ROS
- 安裝ROS-Academy-for-Beginners教學包
- 二進制與源碼包
- 安裝RoboWare Studio
- 單元測試一
- 第二章 ROS文件系統
- Catkin編譯系統
- Catkin工作空間
- Package軟件包
- CMakeLists.txt
- package.xml
- Metapacakge軟件元包
- 其他常見文件類型
- 單元測試二
- 第三章 ROS通信架構(一)
- Node & Master
- Launch文件
- Topic
- Msg
- 常見msg類型
- 單元測試三
- 第四章 ROS通信架構(二)
- Service
- Srv
- Parameter server
- Action
- 常見srv類型
- 常見action類型
- 單元測試四
- 第五章 常用工具
- Gazebo
- RViz
- Rqt
- Rosbag
- Rosbridge
- moveit!
- 單元測試五
- 第六章 roscpp
- Client Library與roscpp
- 節點初始、關閉與NodeHandle
- Topic in roscpp
- Service in roscpp
- Param in roscpp
- 時鐘
- 日志與異常
- 第七章 rospy
- Rospy與主要接口
- Topic in rospy
- Service in rospy
- Param與Time
- 第八章 TF與URDF
- 認識TF
- TF消息
- tf in c++
- tf in python
- 統一機器人描述格式
- 附錄:TF數學基礎
- 三維空間剛體運動---旋轉矩陣
- 三維空間剛體運動---歐拉角
- 三維空間剛體運動---四元數
- 第九章 SLAM
- 地圖
- Gmapping
- Karto
- Hector
- 第十章 Navigation
- Navigation Stack
- move_base
- costmap
- Map_server & Amcl
- 附錄:Navigation工具包說明
- amcl
- local_base_planner
- carrot_planner
- clear_costmap_recovery
- costmap_2d
- dwa_local_planner
- fake_localization
- global_planner
- map_server
- move_base_msg
- move_base
- move_slow_and_clear
- navfn
- nav_core
- robot_pose_ekf
- rotate_recovery