
# 附錄1 三維空間剛體運動
## 旋轉矩陣
$$\quad$$在機器人運動的過程當中,我們通常會設定一個慣性坐標系(或者叫世界坐標系),姑且認為這個坐標系是固定不動的。例如:$$X_W,Y_W,Z_W$$是固定不動的世界坐標系,$$X_C,Y_C,Z_C$$是機器人坐標系。存在一個向量$$P$$,在世界坐標系下的坐標是$$P_W$$,在移動機器人坐標系下的坐標是$$P_C$$,通常情況下,我們通過傳感器已知移動機器人坐標系統下的坐標$$P_C$$,來求$$P$$在世界坐標系下的坐標$$P_W$$
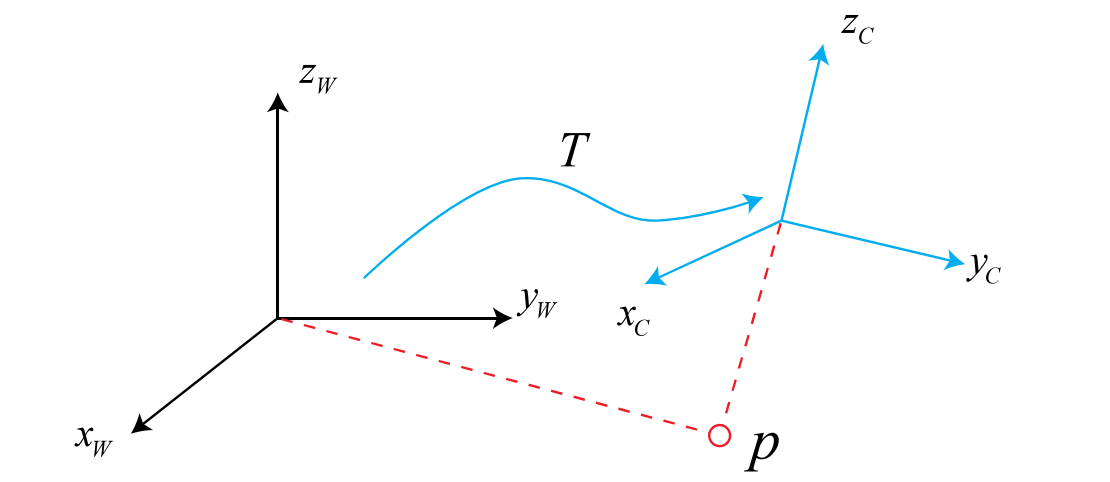
$$\quad$$為了求$$P_W$$,我們必須知道機器人坐標系$$X_C,Y_C,Z_C$$相對與世界坐標$$X_W,Y_W,Z_W$$做了哪些變換。我們定義世界坐標系經過變換矩陣$$T$$之后得到機器人坐標系(這可以通過計算里程和IMU的數據進行測量出來)(這也就說明了為什么在機器人剛剛啟動的時候odom和base\_link坐標系必須是重合的,不然沒有辦法計算旋轉矩陣),另外一般情況下,移動機器人運動是一個剛體運動,也就是說機器人的形狀和大小不會因為坐標系不同而改變,這種變換叫做歐式變換。一個歐式變換可以由旋轉和平移兩個部分組成。首先我們考慮旋轉問題,假設在世界坐標系下的單位正交基$$(e_x,e_y,e_z)$$,在移動機器人坐標系下的單位正交基$$(e^"_x,e^"_y,e^"_z)$$,那么,根據向量$$P$$的模可知:
$$ \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad [e_x,e_y,e_z] \cdot P^T_W=[e^"_x,e^"_y,e^"_z] \cdot P^T_C $$
$$\quad$$因此,$$P^T_C=[e_x,e_y,e_z]^T \cdot [e^"_x,e^"_y,e^"_z] \cdot P^T_W$$,我們將$$[e_x,e_y,e_z]^T \cdot [e^"_x,e^"_y,e^"_z]$$記做旋轉矩陣**R**,因此上面的表達式可以簡化為$$P^T_C=R\cdot P^T_W$$。接下來是平移部分,假設平移部分是$$P^T_{C^"}$$經過平移向量t后得到$$P^T_{C}$$,那么可以得到$$P^T_C=P^T_{C^"}+t=R\cdot P^T_w+t$$。所以通過旋轉矩陣**R**和平移 向量**t**,我們可以描述從世界坐標系到移動機器人坐標系的坐標變換。但是這種表達方式存在一個問題,對于連續的位置變換,例如機器人坐標系是隨著時間在不斷變換的,上面這種表達方式并不是一個線性的表達方式,假設我們經歷了兩次變換$$R_1,t_1$$和$$R_2,t_2$$且滿足:從a到b的變換$$b=R_1a+t_1$$,從b到c的變換$$c=R_2b+t_2$$.那么從a到c的變換是$$c=R_2(R_1a+t_1)+t_2$$.并不是我們希望的的形式$$c=Ra+t$$(然后我們采用齊次坐標的方式進行表達,詳細的部分參考李群李代數).
- 前言
- 第一章 ROS簡介
- 機器人時代的到來
- ROS發展歷程
- 什么是ROS
- 安裝ROS
- 安裝ROS-Academy-for-Beginners教學包
- 二進制與源碼包
- 安裝RoboWare Studio
- 單元測試一
- 第二章 ROS文件系統
- Catkin編譯系統
- Catkin工作空間
- Package軟件包
- CMakeLists.txt
- package.xml
- Metapacakge軟件元包
- 其他常見文件類型
- 單元測試二
- 第三章 ROS通信架構(一)
- Node & Master
- Launch文件
- Topic
- Msg
- 常見msg類型
- 單元測試三
- 第四章 ROS通信架構(二)
- Service
- Srv
- Parameter server
- Action
- 常見srv類型
- 常見action類型
- 單元測試四
- 第五章 常用工具
- Gazebo
- RViz
- Rqt
- Rosbag
- Rosbridge
- moveit!
- 單元測試五
- 第六章 roscpp
- Client Library與roscpp
- 節點初始、關閉與NodeHandle
- Topic in roscpp
- Service in roscpp
- Param in roscpp
- 時鐘
- 日志與異常
- 第七章 rospy
- Rospy與主要接口
- Topic in rospy
- Service in rospy
- Param與Time
- 第八章 TF與URDF
- 認識TF
- TF消息
- tf in c++
- tf in python
- 統一機器人描述格式
- 附錄:TF數學基礎
- 三維空間剛體運動---旋轉矩陣
- 三維空間剛體運動---歐拉角
- 三維空間剛體運動---四元數
- 第九章 SLAM
- 地圖
- Gmapping
- Karto
- Hector
- 第十章 Navigation
- Navigation Stack
- move_base
- costmap
- Map_server & Amcl
- 附錄:Navigation工具包說明
- amcl
- local_base_planner
- carrot_planner
- clear_costmap_recovery
- costmap_2d
- dwa_local_planner
- fake_localization
- global_planner
- map_server
- move_base_msg
- move_base
- move_slow_and_clear
- navfn
- nav_core
- robot_pose_ekf
- rotate_recovery