
【107.1 開關感應器的識別與軟件濾波。】
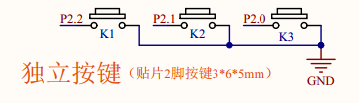
上圖107.1.1 獨立按鍵模擬開關感應器
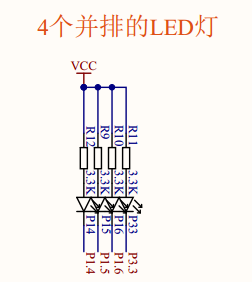
上圖107.1.2 LED電路
什么叫開關感應器?凡是只能輸出0和1這兩種狀態的感應器都可以統稱為開關感應器。前面花了大量的章節講按鍵,按鍵的識別主要是識別電平變化狀態的“下降沿”,程序代碼中有1個特別的變量標志叫“自鎖標志”,還有1個用來消除抖動的“計時器”。本節講的開關感應器跟按鍵很相似,差別在于,開關感應器是識別電平變化狀態的“電平”,程序代碼中沒有“自鎖標志”,但是多增加了1個用來消除抖動的“計時器”,也就是一共有兩個用來消除抖動的“計時器”,這兩個“計時器”相互“清零”相互“抗衡”,從而實現了開關感應器的“消抖”處理,專業術語也叫“軟件濾波”。消抖的時間跟按鍵差不多,我的經驗值是20ms到30ms之間,我平時在項目中喜歡用20ms。
在顯示框架方面,除了之前講過Gu8DisplayUpdate這類“顯示刷新變量”,本節介紹另外一種常用的顯示框架,原理是“某數值跟上一次對比,如果發生了變化(兩數值不一樣),則自動刷新顯示,并及時記錄當前值”。
本節例程實現的功能如下:用K1獨立按鍵模擬開關感應器,K1獨立按鍵“沒有被按下”時是高電平,單片機識別到這種“高電平”,就讓P1.4所在的LED燈發亮;K1獨立按鍵“被按下”時是低電平,單片機識別到這種“低電平”,就讓P1.4所在的LED燈熄滅。
\#include "REG52.H"
\#define SENSOR\_TIME 20 //開關感應器的“濾波”時間
void T0\_time();
void SystemInitial(void) ;
void Delay(unsigned long u32DelayTime) ;
void PeripheralInitial(void) ;
void VoiceScan(void);
void SensorScan(void);
void DisplayTask(void); //顯示的任務函數(LED顯示狀態)
sbit P1\_4=P1^4;
sbit Sensor\_K1\_sr=P2^2; //開關感應器K1所在的引腳
volatile unsigned char vGu8Sensor\_K1=0; //K1開關感應器的當前電平狀態。
void main()
{
SystemInitial();
Delay(10000);
PeripheralInitial();
while(1)
{
DisplayTask(); //顯示的任務函數(LED顯示狀態)
}
}
/\* 注釋一:
\* 后綴為\_Last這類“對比上一次數值發生變化而自動刷新顯示”在“顯示框架”里是很常見的,
\* 目的是,既能及時刷新顯示,又能避免主函數“不斷去執行顯示代碼”而影響程序效率。
\*/
void DisplayTask(void) //顯示的任務函數(LED顯示狀態)
{
// Su8Sensor\_K1\_Last初始化取值255,只要不為0或者1就行,目的是讓上電就發生第一次刷新。
static unsigned char Su8Sensor\_K1\_Last=255; //記錄K1開關感應器上一次的電平狀態。
if(Su8Sensor\_K1\_Last!=vGu8Sensor\_K1) //如果當前值與上一次值不一樣,就自動刷新
{
Su8Sensor\_K1\_Last=vGu8Sensor\_K1; //及時記錄最新值,避免主函數“不斷去執行顯示代碼”
if(0==vGu8Sensor\_K1) //如果當前電平狀態為“低電平”,LED熄滅
{
P1\_4=1; //LED熄滅
}
else //如果當前電平狀態為“高電平”,LED發亮
{
P1\_4=0; //LED發亮
}
}
}
/\* 注釋二:
\* 本節破題的關鍵:
\* 兩個“計時器”相互“清零”相互“抗衡”,從而實現了開關感應器的“消抖”處理,
\* 專業術語也叫“軟件濾波”。這種濾波方式,不管是從“高轉成低”,還是“低轉成高”,
\* 如果在某個瞬間出現干擾抖動,某個計數器都會及時被“清零”,從而起到非常高效的消抖濾波作用。
\*/
void SensorScan(void) //此函數放在定時中斷里每1ms掃描一次,用來識別和濾波開關感應器
{
static unsigned int Su16Sensor\_K1\_H\_Cnt=0; //判斷高電平的計時器
static unsigned int Su16Sensor\_K1\_L\_Cnt=0; //判斷低電平的計時器
if(0==Sensor\_K1\_sr)
{
Su16Sensor\_K1\_H\_Cnt=0; //在判斷低電平的時候,高電平的計時器被清零,巧妙極了!
Su16Sensor\_K1\_L\_Cnt++;
if(Su16Sensor\_K1\_L\_Cnt>=SENSOR\_TIME)
{
Su16Sensor\_K1\_L\_Cnt=0;
vGu8Sensor\_K1=0; //此全局變量反饋當前電平的狀態
}
}
else
{
Su16Sensor\_K1\_L\_Cnt=0; //在判斷高電平的時候,低電平的計時器被清零,巧妙極了!
Su16Sensor\_K1\_H\_Cnt++;
if(Su16Sensor\_K1\_H\_Cnt>=SENSOR\_TIME)
{
Su16Sensor\_K1\_H\_Cnt=0;
vGu8Sensor\_K1=1; //此全局變量反饋當前電平的狀態
}
}
}
void T0\_time() interrupt 1
{
SensorScan(); //開關感應器的識別與軟件濾波處理
TH0=0xfc;
TL0=0x66;
}
void SystemInitial(void)
{
TMOD=0x01;
TH0=0xfc;
TL0=0x66;
EA=1;
ET0=1;
TR0=1;
}
void Delay(unsigned long u32DelayTime)
{
for(;u32DelayTime>0;u32DelayTime--);
}
void PeripheralInitial(void)
{
}
- 首頁
- 第一節:我的價值觀
- 第二節:初學者的疑惑
- 第三節:單片機最重要的一個特性
- 第四節:平臺軟件和編譯器軟件的簡介
- 第五節:用Keil2軟件關閉,新建,打開一個工程的操作流程
- 第六節:把.c源代碼編譯成.hex機器碼的操作流程
- 第七節:本節預留
- 第八節:把.hex機器碼程序燒錄到單片機的操作流程
- 第九節:本節預留
- 第十節:程序從哪里開始,要到哪里去?
- 第十一節:一個在單片機上練習C語言的模板程序
- 第十二節:變量的定義和賦值
- 【TODO】第十三節:賦值語句的覆蓋性
- 【TODO】第十四節:二進制與字節單位,以及常用三種變量的取值范圍
- 【TODO】第十五節:二進制與十六進制
- 【TODO】第十六節:十進制與十六進制
- 【TODO】第十七節:加法運算的5種常用組合
- 【TODO】第十八節:連加、自加、自加簡寫、自加1
- 【TODO】第十九節:加法運算的溢出
- 【TODO】第二十節:隱藏中間變量為何物?
- 【TODO】第二十一節:減法運算的5種常用組合。
- 【TODO】第二十二節:連減、自減、自減簡寫、自減1
- 【TODO】第二十三節:減法溢出與假想借位
- 【TODO】第二十四節:借用unsigned long類型的中間變量可以減少溢出現象
- 【TODO】第二十五節:乘法運算中的5種常用組合
- 【TODO】第二十六節:連乘、自乘、自乘簡寫,溢出
- 【TODO】第二十七節:整除求商
- 【TODO】第二十八節:整除求余
- 【TODO】第二十九節:“先余后商”和“先商后余”提取數據某位,哪家強?
- 【TODO】第三十節:邏輯運算符的“與”運算
- 【TODO】第三十一節:邏輯運算符的“或”運算
- 【TODO】第三十二節:邏輯運算符的“異或”運算
- 【TODO】第三十三節:邏輯運算符的“按位取反”和“非”運算
- 【TODO】第三十四節:移位運算的左移
- 【TODO】第三十五節:移位運算的右移
- 【TODO】第三十六節:括號的強制功能---改變運算優先級
- 【TODO】第三十七節:單字節變量賦值給多字節變量的疑惑
- 【TODO】第三十八節:第二種解決“運算過程中意外溢出”的便捷方法
- 【TODO】第三十九節:if判斷語句以及常量變量的真假判斷
- 【TODO】第四十節:關系符的等于“==”和不等于“!=”
- 【TODO】第四十一節:關系符的大于“>”和大于等于“>=”
- 【TODO】第四十二節:關系符的小于“<”和小于等于“<=”
- 【TODO】第四十三節:關系符中的關系符:與“&&”,或“||”
- 【TODO】第四十四節:小括號改變判斷優先級
- 【TODO】第四十五節: 組合判斷if...else if...else
- 【TODO】第四十六節: 一維數組
- 【TODO】第四十七節: 二維數組
- 【TODO】第四十八節: while循環語句
- 【TODO】第四十九節: 循環語句do while和for
- 【TODO】第五十節: 循環體內的continue和break語句
- 【TODO】第五十一節: for和while的循環嵌套
- 【TODO】第五十二節: 支撐程序框架的switch語句
- 【TODO】第五十三節: 使用函數的三要素和執行順序
- 【TODO】第五十四節: 從全局變量和局部變量中感悟“棧”為何物
- 【TODO】第五十五節: 函數的作用和四種常見書寫類型
- 【TODO】第五十六節: return在函數中的作用以及四個容易被忽略的功能
- 【TODO】第五十七節: static的重要作用
- 【TODO】第五十八節: const(./book/或code)在定義數據時的作用
- 【TODO】第五十九節: 全局“一鍵替換”功能的#define
- 【TODO】第六十節: 指針在變量(./book/或常量)中的基礎知識
- 【TODO】第六十一節: 指針的中轉站作用,地址自加法,地址偏移法
- 【TODO】第六十二節: 指針,大小端,化整為零,化零為整
- 【TODO】第六十三節: 指針“化整為零”和“化零為整”的“靈活”應用
- 【TODO】第六十四節: 指針讓函數具備了多個相當于return的輸出口
- 【TODO】第六十五節: 指針作為數組在函數中的入口作用
- 【TODO】第六十六節: 指針作為數組在函數中的出口作用
- 【TODO】第六十七節: 指針作為數組在函數中既“入口”又“出口”的作用
- 【TODO】第六十八節: 為函數接口指針“定向”的const關鍵詞
- 【TODO】第六十九節: 宏函數sizeof(./book/)
- 【TODO】第七十節: “萬能數組”的結構體
- 【TODO】第七十一節: 結構體的內存和賦值
- 【TODO】第七十二節: 結構體的指針
- 【TODO】第七十三節: 結構體數據的傳輸存儲和還原
- 【TODO】第七十四節: 結構體指針在函數接口處的頻繁應用
- 【TODO】第七十五節: 指針的名義(例:一維指針操作二維數組)
- 【TODO】第七十六節: 二維數組的指針
- 【TODO】第七十七節: 指針唯一的“單向輸出”通道return
- 【TODO】第七十八節: typedef和#define和enum
- 【TODO】第七十九節: 各種變量常量的命名規范
- 【TODO】第八十節: 單片機IO口驅動LED
- 【TODO】第八十一節: 時間和速度的起源(指令周期和晶振頻率)
- 【TODO】第八十二節: Delay“阻塞”延時控制LED閃爍
- 【TODO】第八十三節: 累計主循環的“非阻塞”延時控制LED閃爍
- 【TODO】第八十四節: 中斷與中斷函數
- 【TODO】第八十五節: 定時中斷的寄存器配置
- 【TODO】第八十六節: 定時中斷的“非阻塞”延時控制LED閃爍
- 【TODO】第八十七節: 一個定時中斷產生N個軟件定時器
- 【TODO】第八十八節: 兩大核心框架理論(四區一線,switch外加定時中斷)
- 【TODO】第八十九節: 跑馬燈的三種境界
- 【TODO】第九十節: 多任務并行處理兩路跑馬燈
- 【TODO】第九十一節: 蜂鳴器的“非阻塞”驅動
- 【TODO】第九十二節: 獨立按鍵的四大要素(自鎖,消抖,非阻塞,清零式濾波)
- 【TODO】第九十三節: 獨立按鍵鼠標式的單擊與雙擊
- 【TODO】第九十四節: 兩個獨立按鍵構成的組合按鍵
- 【TODO】第九十五節: 兩個獨立按鍵的“電腦鍵盤式”組合按鍵
- 【TODO】第九十六節: 獨立按鍵“一鍵兩用”的短按與長按
- 【TODO】第九十七節: 獨立按鍵按住不松手的連續均勻觸發
- 【TODO】第九十八節: 獨立按鍵按住不松手的“先加速后勻速”的觸發
- 【TODO】第九十九節: “行列掃描式”矩陣按鍵的單個觸發(原始版)
- 【TODO】第一百節: “行列掃描式”矩陣按鍵的單個觸發(優化版)
- 【TODO】第一百零一節: 矩陣按鍵鼠標式的單擊與雙擊
- 【TODO】第一百零二節: 兩個“任意行輸入”矩陣按鍵的“有序”組合觸發
- 【TODO】第一百零三節: 兩個“任意行輸入”矩陣按鍵的“無序”組合觸發
- 【TODO】第一百零四節: 矩陣按鍵“一鍵兩用”的短按與長按
- 【TODO】第一百零五節: 矩陣按鍵按住不松手的連續均勻觸發
- 【TODO】第一百零六節: 矩陣按鍵按住不松手的“先加速后勻速”觸發
- 【TODO】第一百零七節: 開關感應器的識別與軟件濾波
- 【TODO】第一百零八節: 按鍵控制跑馬燈的啟動和暫停和停止
- 【TODO】第一百零九節: 按鍵控制跑馬燈的方向
- 【TODO】第一百一十節: 按鍵控制跑馬燈的速度
- 第一百一十一節: 工業自動化設備的開關信號的運動控制
- 【TODO】第一百一十二節: 數碼管顯示的基礎知識
- 【TODO】第一百一十三節: 動態掃描的數碼管顯示數字
- 【TODO】第一百一十四節: 動態掃描的數碼管顯示小數點
- 【TODO】第一百一十五節: 按鍵控制數碼管的秒表
- 【TODO】第一百一十六節: 按鍵控制數碼管的倒計時
- 【TODO】第一百一十七節: 按鍵切換數碼管窗口來設置參數
- 【TODO】第一百一十八節: 按鍵讓某位數碼管閃爍跳動來設置參數
- 【TODO】第一百一十九節: 一個完整的人機界面的程序框架的脈絡
- 【TODO】第一百二十節: 按鍵切換窗口切換局部來設置參數
- 【TODO】第一百二十一節: 可調參數的數碼管倒計時
- 【TODO】第一百二十二節: 利用定時中斷做的“時分秒”數顯時鐘
- 【TODO】第一百二十三節: 一種能省去一個lock自鎖變量的按鍵驅動程序
- 【TODO】第一百二十四節: 數顯儀表盤顯示“速度、方向、計數器”的跑馬燈
- 【TODO】第一百二十五節: “雙線”的肢體接觸通信
- 【TODO】第一百二十六節: “單線”的肢體接觸通信
- 【TODO】第一百二十七節: 單片機串口接收數據的機制
- 【TODO】第一百二十八節: 接收“固定協議”的串口程序框架
- 【TODO】第一百二十九節: 接收帶“動態密匙”與“累加和”校驗數據的串口程序框架
- 【TODO】第一百三十節: 接收帶“動態密匙”與“異或”校驗數據的串口程序框架
- 【TODO】第一百三十一節: 靈活切換各種不同大小“接收內存”的串口程序框架
- 【TODO】第一百三十二節:“轉發、透傳、多種協議并存”的雙緩存串口程序框架
- 【TODO】第一百三十三節:常用的三種串口發送函數
- 【TODO】第一百三十四節:“應用層半雙工”雙機串口通訊的程序框架