
# 七、TensorFlow 和 Keras 中的用于時間序列數據的 RNN
時間序列數據是一系列值,以不同的時間間隔記錄或測量。作為序列,RNN 架構是從這些數據訓練模型的最佳方法。在本章中,我們將使用示例時間序列數據集來展示如何使用 TensorFlow 和 Keras 構建 RNN 模型。
我們將在本章中介紹以下主題:
* 航空公司乘客(`airpass`)時間序列數據集:
* 描述和下載數據集
* 可視化數據集
* 在 TensorFlow 中預處理 RNN 的數據集
* TensorFlow 中用于時間序列數據的 RNN:
* TensorFlow 中的`SimpleRNN`
* TensorFlow 中的 LSTM
* TensorFlow 中的 GRU
* 在 Keras 中為 RNN 預處理數據集
* Keras 中用于時間序列數據的 RNN:
* Keras 的`SimpleRNN`
* Keras 的 LSTM
* Keras 的 GRU
讓我們從了解樣本數據集開始。
您可以按照 Jupyter 筆記本中的代碼`ch-07a_RNN_TimeSeries_TensorFlow`。
# 航空公司乘客數據集
為了簡潔起見,我們選擇了一個名為國際航空公司乘客(航空通票)的非常小的數據集。該數據包含從 1949 年 1 月到 1960 年 12 月的每月總乘客數量。數據集中的數字是指數千的數量。該數據集最初由 Box 和 Jenkins 在 1976 年的工作中使用。它作為 **時間序列數據集庫**(**TSDL**)的一部分與 Rob Hyndman 教授的各種其他時間序列數據集一起收集。在澳大利亞莫納什大學。后來,TSDL 被轉移到 [DataMarket](http://datamarket.com)。
[您可以從此鏈接下載數據集](https://datamarket.com/data/set/22u3/international-airline-passengers-monthly-totals-in-thousands-jan-49-dec-60)。
# 加載 airpass 數據集
我們將數據集保存為數據集根目錄(`~/datasets`)中`ts-data`文件夾中的 CSV 文件,并使用以下命令將數據加載到 pandas 數據框中:
```py
filepath = os.path.join(datasetslib.datasets_root,
'ts-data',
'international-airline-passengers-cleaned.csv'
)
dataframe = pd.read_csv(filepath,usecols=[1],header=0)
dataset = dataframe.values
dataset = dataset.astype(np.float32)
```
從 NumPy 數組中的數據框中提取值并轉換為`np.float32`:
```py
dataset = dataframe.values
dataset = dataset.astype(np.float32)
```
# 可視化 airpass 數據集
讓我們看一下數據集的外觀:
```py
plt.plot(dataset,label='Original Data')
plt.legend()
plt.show()
```
`airpass`數據集的圖如下所示:
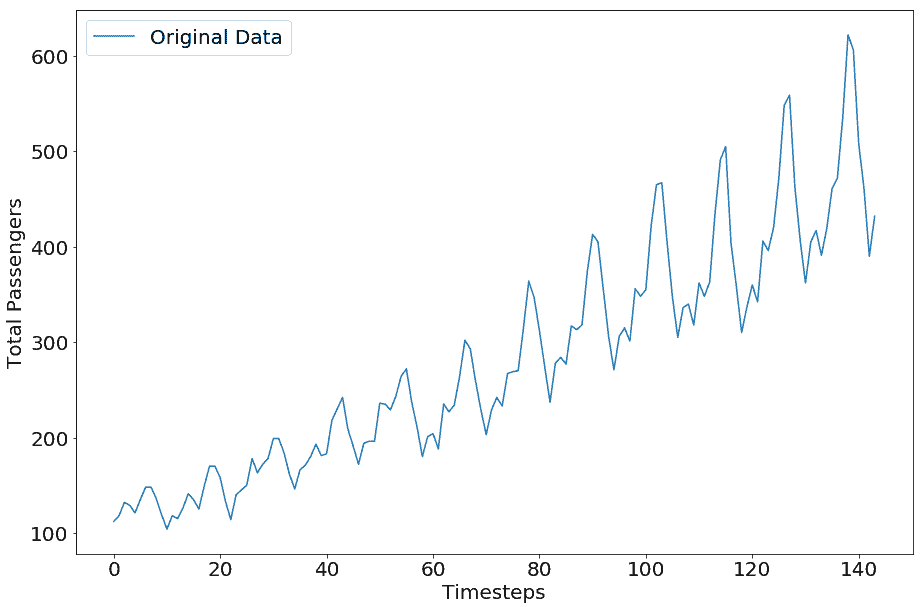Airline Passengers Dataset
# 用于 TensorFlow RNN 模型的數據集預處理
為了使其為學習模型做好準備,通過應用 MinMax 縮放來正則化數據集,該縮放使數據集值介于 0 和 1 之間。您可以嘗試根據數據的性質對數據應用不同的縮放方法。
```py
# normalize the dataset
scaler = skpp.MinMaxScaler(feature_range=(0, 1))
normalized_dataset = scaler.fit_transform(dataset)
```
我們使用自己開發的實用函數將數據集拆分為訓練和測試數據集。必須拆分數據而不對數據集進行混洗,因為改組數據集會破壞序列。維護數據序列對于訓練時間序列模型非常重要。
```py
train,test=tsu.train_test_split(normalized_dataset,train_size=0.67)
```
然后我們將訓練和測試數據集轉換為有監督的機器學習集。讓我們試著理解監督學習集的含義。假設我們有一系列數據:`1,2,3,4,5`。我們想要了解生成數據集的概率分布。為了做到這一點,我們可以假設時間步長`t`的值是從時間步長`t-1`到`tk`的值的結果,其中`k`是窗口大小。為簡化起見,假設窗口大小為 1。因此,時間步長`t`的值(稱為輸入特征)是時間步長值`t-1`的結果,被稱為目標。讓我們重復一遍所有時間步驟,我們得到下表:
| 輸入值或特征 | 輸出值或目標 |
| --- | --- |
| 1 | 2 |
| 2 | 3 |
| 3 | 4 |
| 4 | 5 |
我們展示的示例只有一個變量值,它將轉換為特征和目標。當目標值取決于一個變量時,它被稱為單變量時間序列。同樣的邏輯可以應用于多變量時間序列,其中目標取決于多個變量。我們使用`x`來表示輸入特征,使用`y`來表示輸出目標。
考慮到這一背景,為了將`airpass`數據轉換為監督機器學習數據,我們設置了以下超參數:
1. 設置用于學習或預測下一個時間步的過去時間步數:
```py
n_x=1
```
1. 設置學習或預測的未來時間步長的數量:
```py
n_y=1
```
1. 設置用于學習的`x`變量的數量;由于當前示例是單變量的,因此設置為 1:
```py
n_x_vars = 1
```
1. 設置要預測的`y`變量的數量;由于當前示例是單變量的,因此設置為 1:
```py
n_y_vars = 1
```
1. 最后,我們通過應用本節開頭所述的邏輯將訓練和測試數據集轉換為`X`和`Y`集:
```py
X_train, Y_train, X_test, Y_test = tsu.mvts_to_xy(train,
test,n_x=n_x,n_y=n_y)
```
現在數據已經過預處理并可以輸入到我們的模型中,讓我們使用 TensorFlow 準備一個`SimpleRNN`模型。
# TensorFlow 中的簡單 RNN
在 TensorFlow 中定義和訓練簡單 RNN 的工作流程如下:
1. 定義模型的超參數:
```py
state_size = 4
n_epochs = 100
n_timesteps = n_x
learning_rate = 0.1
```
這里新的超參數是`state_size`。`state_size`表示 RNN 單元的權重向量的數量。
1. 為模型定義`X`和`Y`參數的占位符。`X`占位符的形狀為`(batch_size, number_of_input_timesteps, number_of_inputs)`,`Y`占位符的形狀為`(batch_size, number_of_output_timesteps, number_of_outputs)`。對于`batch_size`,我們使用`None`,以便我們以后可以輸入任意大小的批次。
```py
X_p = tf.placeholder(tf.float32, [None, n_timesteps, n_x_vars],
name='X_p')
Y_p = tf.placeholder(tf.float32, [None, n_timesteps, n_y_vars],
name='Y_p')
```
1. 將輸入占位符`X_p`轉換為長度等于時間步數的張量列表,在此示例中為`n_x`或 1:
```py
# make a list of tensors of length n_timesteps
rnn_inputs = tf.unstack(X_p,axis=1)
```
1. 使用`tf.nn.rnn_cell.BasicRNNCell`創建一個簡單的 RNN 單元:
```py
cell = tf.nn.rnn_cell.BasicRNNCell(state_size)
```
1. TensorFlow 提供`static_rnn`和`dynamic_rnn`便利方法(以及其他方法)分別創建靜態和動態 RNN。創建靜態 RNN:
```py
rnn_outputs, final_state = tf.nn.static_rnn(cell,
rnn_inputs,
dtype=tf.float32
)
```
靜態 RNN 在編譯時創建單元,即展開循環。動態 RNN 創建單元,即在運行時展開循環 。在本章中,我們僅展示了`static_rnn`的示例,但是一旦獲得靜態 RNN 的專業知識,就應該探索`dynamic_rnn`。
`static_rnn`方法采用以下參數:
* `cell`:我們之前定義的基本 RNN 單元對象。它可能是另一種單元,我們將在本章中進一步看到。
* `rnn_inputs`:形狀`(batch_size, number_of_inputs)`的張量列表。
* `dtype`:初始狀態和預期輸出的數據類型。
1. 定義預測層的權重和偏差參數:
```py
W = tf.get_variable('W', [state_size, n_y_vars])
b = tf.get_variable('b', [n_y_vars],
initializer=tf.constant_initializer(0.0))
```
1. 將預測層定義為密集線性層:
```py
predictions = [tf.matmul(rnn_output, W) + b \
for rnn_output in rnn_outputs]
```
1. 輸出 Y 是張量的形狀;將其轉換為張量列表:
```py
y_as_list = tf.unstack(Y_p, num=n_timesteps, axis=1)
```
1. 將損失函數定義為預測標簽和實際標簽之間的均方誤差:
```py
mse = tf.losses.mean_squared_error
losses = [mse(labels=label, predictions=prediction)
for prediction, label in zip(predictions, y_as_list)
]
```
1. 將總損失定義為所有預測時間步長的平均損失:
```py
total_loss = tf.reduce_mean(losses)
```
1. 定義優化器以最小化`total_loss`:
```py
optimizer = tf.train.AdagradOptimizer(learning_rate).minimize(total_loss)
```
1. 現在我們已經定義了模型,損耗和優化器函數,讓我們訓練模型并計算訓練損失:
```py
with tf.Session() as tfs:
tfs.run(tf.global_variables_initializer())
epoch_loss = 0.0
for epoch in range(n_epochs):
feed_dict={X_p: X_train.reshape(-1, n_timesteps,
n_x_vars),
Y_p: Y_train.reshape(-1, n_timesteps,
n_x_vars)
}
epoch_loss,y_train_pred,_=tfs.run([total_loss,predictions,
optimizer], feed_dict=feed_dict)
print("train mse = {}".format(epoch_loss))
```
我們得到以下值:
```py
train mse = 0.0019413739209994674
```
1. 讓我們在測試數據上測試模型:
```py
feed_dict={X_p: X_test.reshape(-1, n_timesteps,n_x_vars),
Y_p: Y_test.reshape(-1, n_timesteps,n_y_vars)
}
test_loss, y_test_pred = tfs.run([total_loss,predictions],
feed_dict=feed_dict
)
print('test mse = {}'.format(test_loss))
print('test rmse = {}'.format(math.sqrt(test_loss)))
```
我們在測試數據上得到以下 mse 和 rmse(均方根誤差):
```py
test mse = 0.008790395222604275
test rmse = 0.09375710758446143
```
這非常令人印象深刻。
這是一個非常簡單的例子,只用一個變量值預測一個時間步。在現實生活中,輸出受到多個特征的影響,并且需要預測不止一個時間步。后一類問題被稱為多變量多時間步進預測問題。這些問題是使用循環神經網絡進行更好預測的積極研究領域。
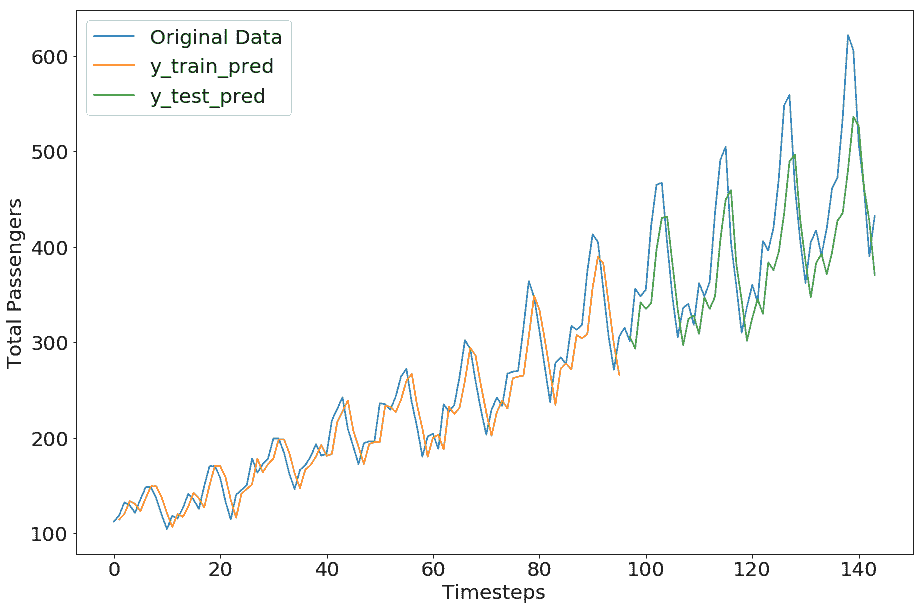
現在讓我們重新調整預測和原始值并繪制原始值(請在筆記本中查找代碼)。
我們得到以下繪圖:
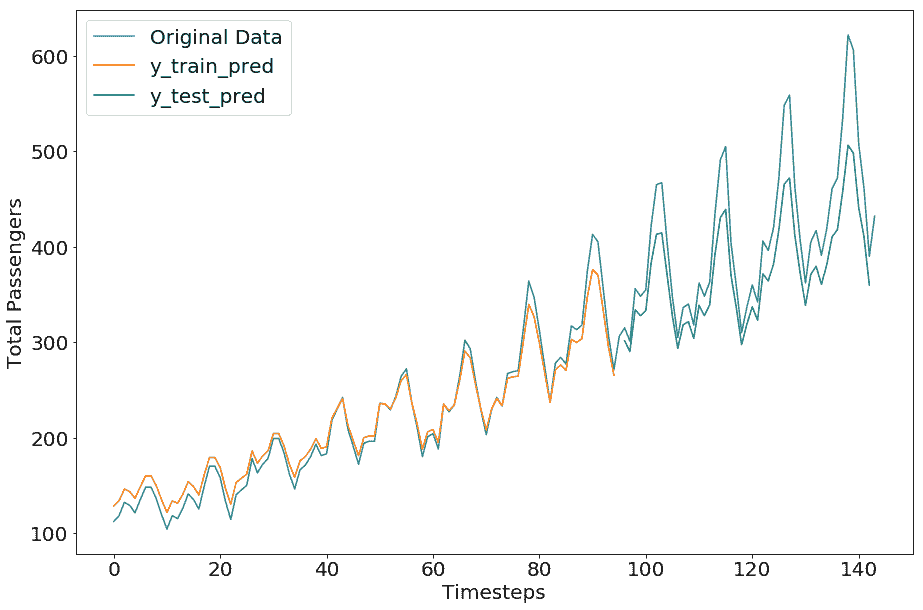
令人印象深刻的是,在我們的簡單示例中,預測數據幾乎與原始數據相匹配。對這種準確預測的一種可能解釋是,單個時間步的預測基于來自最后一個時間步的單個變量的預測,因此它們總是在先前值的附近。
盡管如此,前面示例的目的是展示在 TensorFlow 中創建 RNN 的方法。現在讓我們使用 RNN 變體重新創建相同的示例。
# TensorFlow 中的 LSTM
由于爆炸和消失梯度的問題,簡單的 RNN 架構并不總是有效,因此使用了改進的 RNN 架構,例如 LSTM 網絡。 TensorFlow 提供 API 來創建 LSTM RNN 架構。
在上一節中展示的示例中,要將簡單 RNN 更改為 LSTM 網絡,我們所要做的就是更改單元類型,如下所示:
```py
cell = tf.nn.rnn_cell.LSTMCell(state_size)
```
其余代碼保持不變,因為 TensorFlow 會為您在 LSTM 單元內創建門。
筆記本`ch-07a_RNN_TimeSeries_TensorFlow`中提供了 LSTM 模型的完整代碼。
然而,對于 LSTM,我們必須運行 600 個周期的代碼才能使結果更接近基本 RNN。原因是 LSTM 需要學習更多參數,因此需要更多的訓練迭代。對于我們的簡單示例,它似乎有點過分,但對于較大的數據集,與簡單的 RNN 相比,LSTM 顯示出更好的結果。
具有 LSTM 架構的模型的輸出如下:
```py
train mse = 0.0020806745160371065
test mse = 0.01499235536903143
test rmse = 0.12244327408653947
```
# TensorFlow 中的 GRU
要將最后一節中的 LSTM 示例更改為 GRU 網絡, 按如下方式更改單元類型,TensorFlow 將為您處理其余部分:
```py
cell = tf.nn.rnn_cell.GRUCell(state_size)
```
筆記本`ch-07a_RNN_TimeSeries_TensorFlow`中提供了 GRU 模型的完整代碼。
對于小`airpass`數據集,GRU 在相同數量的周期中表現出更好的表現。在實踐中,GRU 和 LSTM 表現出相當的表現。就執行速度而言,與 LSTM 相比,GRU 模型訓練和預測更快。
GRU 模型的完整代碼在 Jupyter 筆記本中提供。GRU 模型的結果如下:
```py
train mse = 0.0019633215852081776
test mse = 0.014307591132819653
test rmse = 0.11961434334066987
```
我們鼓勵您探索 TensorFlow 中可用的其他選項來創建循環神經網絡。現在讓我們在 TensorFlow 的一個高級庫中嘗試相同的示例。
對于下一節,您可以按照 Jupyter 筆記本中的代碼`ch-07b_RNN_TimeSeries_Keras`。
# 用于 Keras RNN 模型的數據集預處理
與使用較低級別 TensorFlow 類和方法構建相比,在 Keras 中構建 RNN 網絡要簡單得多。對于 Keras,我們預先處理數據,如前面部分所述,以獲得受監督的機器學習時間序列數據集:`X_train, Y_train, X_test, Y_test`。
從這里開始,預處理有所不同。對于 Keras,輸入必須是`(samples, time steps, features)`形狀。當我們將數據轉換為監督機器學習格式時,在重塑數據時,我們可以將時間步長設置為 1,從而將所有輸入時間步長作為特征,或者我們可以設置時間步長為實際的時間步數,從而為每個時間步長提供特征集。換句話說,我們之前獲得的`X_train`和`X_test`數據集可以重新整形為以下方法之一:
方法 1:`n`時間步長與`1`特征:
```py
X_train.reshape(X_train.shape[0], X_train.shape[1],1)
```
方法 2:`1`時間步長`n`特征:
```py
X_train.reshape(X_train.shape[0], 1, X_train.shape[1])
```
在本章中,我們將對特征大小為 1 的數據集進行整形,因為我們只使用一個變量作為輸入:
```py
# reshape input to be [samples, time steps, features]
X_train = X_train.reshape(X_train.shape[0], X_train.shape[1],1)
X_test = X_test.reshape(X_test.shape[0], X_train.shape[1], 1)
```
# Keras 中的簡單 RNN
通過添加具有內部神經元數量和輸入張量形狀的`SimpleRNN`層,可以在 Keras 中輕松構建 RNN 模型,不包括樣本維數。以下代碼創建,編譯和擬合`SimpleRNN`:
```py
# create and fit the SimpleRNN model
model = Sequential()
model.add(SimpleRNN(units=4, input_shape=(X_train.shape[1],
X_train.shape[2])))
model.add(Dense(1))
model.compile(loss='mean_squared_error', optimizer='adam')
model.fit(X_train, Y_train, epochs=20, batch_size=1)
```
由于我們的數據集很小,我們使用`batch_size`為 1 并訓練 20 次迭代,但對于較大的數據集,您需要調整這些和其他超參數的值。
該模型的結構如下:
```py
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
simple_rnn_1 (SimpleRNN) (None, 4) 24
_________________________________________________________________
dense_1 (Dense) (None, 1) 5
=================================================================
Total params: 29
Trainable params: 29
Non-trainable params: 0
```
訓練的結果如下:
```py
Epoch 1/20
95/95 [==============================] - 0s - loss: 0.0161
Epoch 2/20
95/95 [==============================] - 0s - loss: 0.0074
Epoch 3/20
95/95 [==============================] - 0s - loss: 0.0063
Epoch 4/20
95/95 [==============================] - 0s - loss: 0.0051
-- epoch 5 to 14 removed for the sake of brevity --
Epoch 14/20
95/95 [==============================] - 0s - loss: 0.0021
Epoch 15/20
95/95 [==============================] - 0s - loss: 0.0020
Epoch 16/20
95/95 [==============================] - 0s - loss: 0.0020
Epoch 17/20
95/95 [==============================] - 0s - loss: 0.0020
Epoch 18/20
95/95 [==============================] - 0s - loss: 0.0020
Epoch 19/20
95/95 [==============================] - 0s - loss: 0.0020
Epoch 20/20
95/95 [==============================] - 0s - loss: 0.0020
```
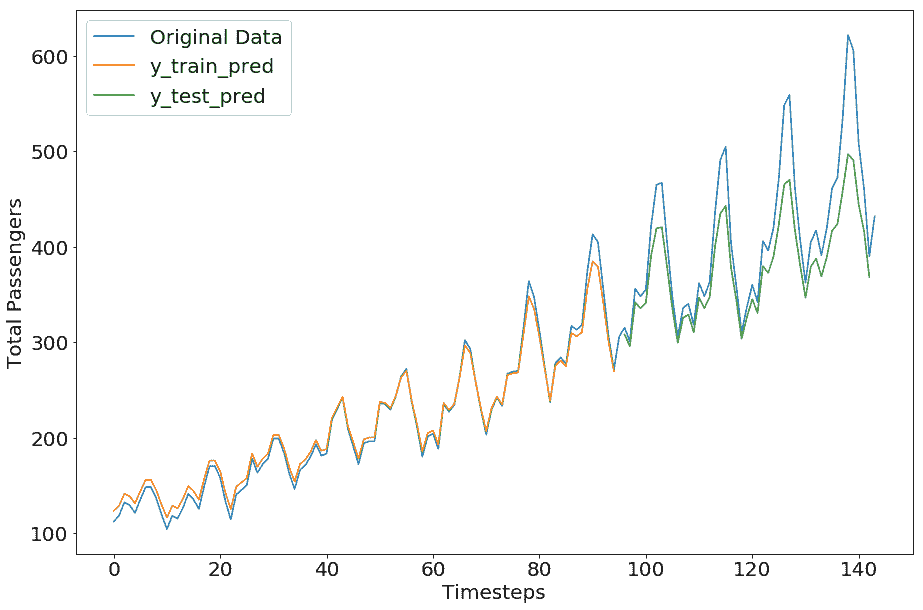
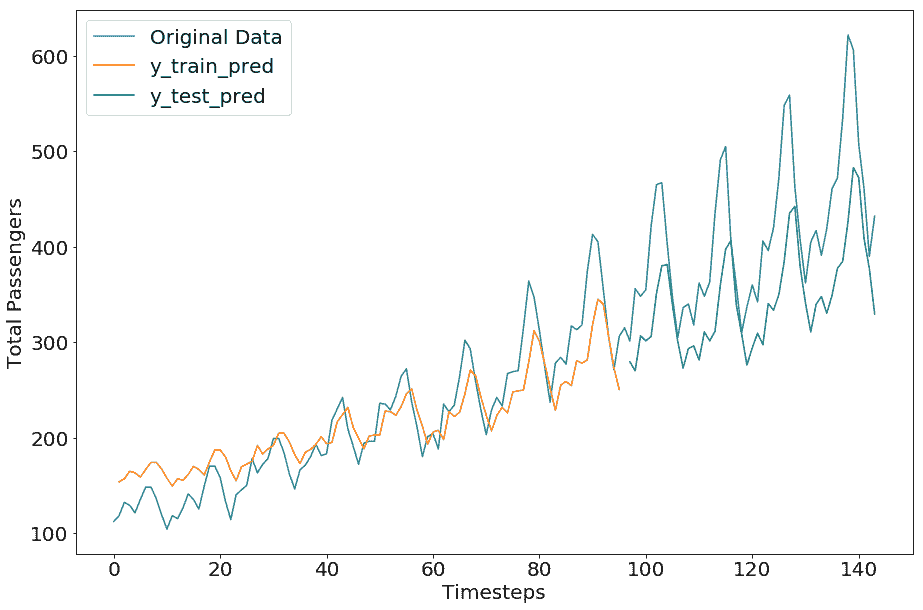
損失從 0.0161 開始,平穩在 0.0020。讓我們做出預測并重新調整預測和原件。我們使用 Keras 提供的函數來計算均方根誤差:
```py
from keras.losses import mean_squared_error as k_mse
from keras.backend import sqrt as k_sqrt
import keras.backend as K
# make predictions
y_train_pred = model.predict(X_train)
y_test_pred = model.predict(X_test)
# invert predictions
y_train_pred = scaler.inverse_transform(y_train_pred)
y_test_pred = scaler.inverse_transform(y_test_pred)
#invert originals
y_train_orig = scaler.inverse_transform(Y_train)
y_test_orig = scaler.inverse_transform(Y_test)
# calculate root mean squared error
trainScore = k_sqrt(k_mse(y_train_orig[:,0],
y_train_pred[:,0])
).eval(session=K.get_session())
print('Train Score: {0:.2f} RMSE'.format(trainScore))
testScore = k_sqrt(k_mse(y_test_orig[:,0],
y_test_pred[:,0])
).eval(session=K.get_session())
print('Test Score: {0:.2f} RMSE'.format(testScore))
```
我們得到以下結果:
```py
Train Score: 23.27 RMSE
Test Score: 54.13 RMSE
```
我們可以看到,這不像我們在 TensorFlow 部分得到的那樣完美;但是,這種差異是因為超參數值。我們留給您嘗試不同的超參數值來調整此 Keras 模型以獲得更好的結果。
# Keras 中的 LSTM
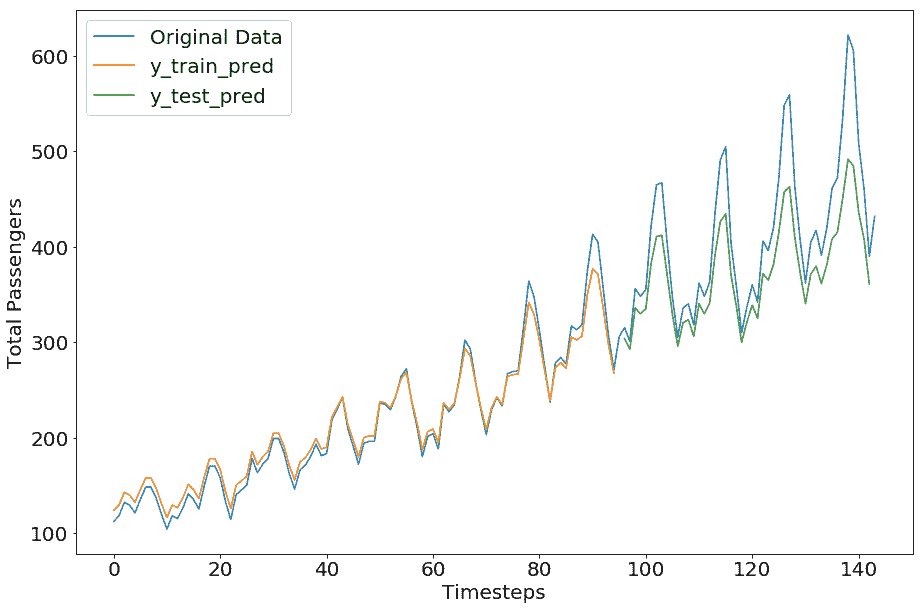
創建 LSTM 模型只需添加 LSTM 層而不是`SimpleRNN`層,如下所示:
```py
model.add(LSTM(units=4, input_shape=(X_train.shape[1], X_train.shape[2])))
```
模型結構如下所示:
```py
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
lstm_1 (LSTM) (None, 4) 96
_________________________________________________________________
dense_1 (Dense) (None, 1) 5
=================================================================
Total params: 101
Trainable params: 101
Non-trainable params: 0
_________________________________________________________________
```
筆記本`ch-07b_RNN_TimeSeries_Keras`中提供了 LSTM 模型的完整代碼。
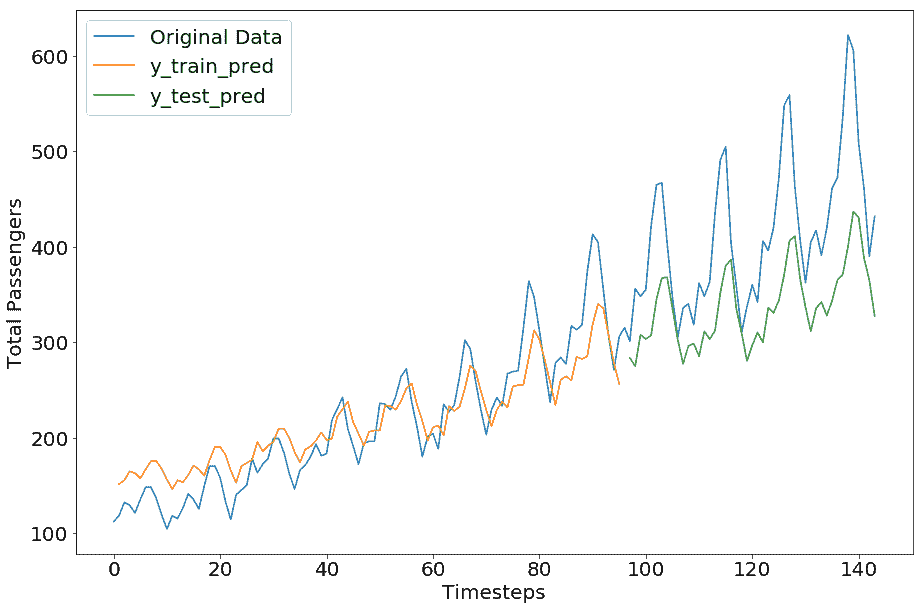
由于 LSTM 模型具有更多需要訓練的參數,對于相同數量的迭代(20 個周期),我們得到更高的誤差分數。我們留給您探索周期和其他超參數的各種值,以獲得更好的結果:
```py
Train Score: 32.21 RMSE
Test Score: 84.68 RMSE
```
# Keras 中的 GRU
使用 TensorFlow 和 Keras 的一個優點是它們可以輕松創建模型。與 LSTM 一樣,創建 GRU 模型只需添加 GRU 層而不是 LSTM 或`SimpleRNN`層,如下所示:
```py
model.add(GRU(units=4, input_shape=(X_train.shape[1], X_train.shape[2])))
```
模型結構如下:
```py
Layer (type) Output Shape Param #
=================================================================
gru_1 (GRU) (None, 4) 72
_________________________________________________________________
dense_1 (Dense) (None, 1) 5
=================================================================
Total params: 77
Trainable params: 77
Non-trainable params: 0
```
筆記本`ch-07b_RNN_TimeSeries_Keras`中提供了 GRU 模型的完整代碼。
正如預期的那樣,GRU 模型顯示出與 LSTM 幾乎相同的表現,我們讓您嘗試使用不同的超參數值來優化此模型:
```py
Train Score: 31.49 RMSE
Test Score: 92.75 RMSE
```
# 總結
時間序列數據是基于序列的數據,因此 RNN 模型是從時間序列數據中學習的相關架構。在本章中,您學習了如何使用 TensorFlow(一個低級庫)和 Keras(一個高級庫)創建不同類型的 RNN 模型。我們只介紹了`SimpleRNN`,LSTM 和 GRU,但您應該探索可以使用 TensorFlow 和 Keras 創建的許多其他 RNN 變體。
在下一章中,我們將使用當前章節和前幾章中構建的基礎為各種**自然語言處理**(**NLP**)任務創建文本數據的 RNN 模型。
- TensorFlow 1.x 深度學習秘籍
- 零、前言
- 一、TensorFlow 簡介
- 二、回歸
- 三、神經網絡:感知器
- 四、卷積神經網絡
- 五、高級卷積神經網絡
- 六、循環神經網絡
- 七、無監督學習
- 八、自編碼器
- 九、強化學習
- 十、移動計算
- 十一、生成模型和 CapsNet
- 十二、分布式 TensorFlow 和云深度學習
- 十三、AutoML 和學習如何學習(元學習)
- 十四、TensorFlow 處理單元
- 使用 TensorFlow 構建機器學習項目中文版
- 一、探索和轉換數據
- 二、聚類
- 三、線性回歸
- 四、邏輯回歸
- 五、簡單的前饋神經網絡
- 六、卷積神經網絡
- 七、循環神經網絡和 LSTM
- 八、深度神經網絡
- 九、大規模運行模型 -- GPU 和服務
- 十、庫安裝和其他提示
- TensorFlow 深度學習中文第二版
- 一、人工神經網絡
- 二、TensorFlow v1.6 的新功能是什么?
- 三、實現前饋神經網絡
- 四、CNN 實戰
- 五、使用 TensorFlow 實現自編碼器
- 六、RNN 和梯度消失或爆炸問題
- 七、TensorFlow GPU 配置
- 八、TFLearn
- 九、使用協同過濾的電影推薦
- 十、OpenAI Gym
- TensorFlow 深度學習實戰指南中文版
- 一、入門
- 二、深度神經網絡
- 三、卷積神經網絡
- 四、循環神經網絡介紹
- 五、總結
- 精通 TensorFlow 1.x
- 一、TensorFlow 101
- 二、TensorFlow 的高級庫
- 三、Keras 101
- 四、TensorFlow 中的經典機器學習
- 五、TensorFlow 和 Keras 中的神經網絡和 MLP
- 六、TensorFlow 和 Keras 中的 RNN
- 七、TensorFlow 和 Keras 中的用于時間序列數據的 RNN
- 八、TensorFlow 和 Keras 中的用于文本數據的 RNN
- 九、TensorFlow 和 Keras 中的 CNN
- 十、TensorFlow 和 Keras 中的自編碼器
- 十一、TF 服務:生產中的 TensorFlow 模型
- 十二、遷移學習和預訓練模型
- 十三、深度強化學習
- 十四、生成對抗網絡
- 十五、TensorFlow 集群的分布式模型
- 十六、移動和嵌入式平臺上的 TensorFlow 模型
- 十七、R 中的 TensorFlow 和 Keras
- 十八、調試 TensorFlow 模型
- 十九、張量處理單元
- TensorFlow 機器學習秘籍中文第二版
- 一、TensorFlow 入門
- 二、TensorFlow 的方式
- 三、線性回歸
- 四、支持向量機
- 五、最近鄰方法
- 六、神經網絡
- 七、自然語言處理
- 八、卷積神經網絡
- 九、循環神經網絡
- 十、將 TensorFlow 投入生產
- 十一、更多 TensorFlow
- 與 TensorFlow 的初次接觸
- 前言
- 1.?TensorFlow 基礎知識
- 2. TensorFlow 中的線性回歸
- 3. TensorFlow 中的聚類
- 4. TensorFlow 中的單層神經網絡
- 5. TensorFlow 中的多層神經網絡
- 6. 并行
- 后記
- TensorFlow 學習指南
- 一、基礎
- 二、線性模型
- 三、學習
- 四、分布式
- TensorFlow Rager 教程
- 一、如何使用 TensorFlow Eager 構建簡單的神經網絡
- 二、在 Eager 模式中使用指標
- 三、如何保存和恢復訓練模型
- 四、文本序列到 TFRecords
- 五、如何將原始圖片數據轉換為 TFRecords
- 六、如何使用 TensorFlow Eager 從 TFRecords 批量讀取數據
- 七、使用 TensorFlow Eager 構建用于情感識別的卷積神經網絡(CNN)
- 八、用于 TensorFlow Eager 序列分類的動態循壞神經網絡
- 九、用于 TensorFlow Eager 時間序列回歸的遞歸神經網絡
- TensorFlow 高效編程
- 圖嵌入綜述:問題,技術與應用
- 一、引言
- 三、圖嵌入的問題設定
- 四、圖嵌入技術
- 基于邊重構的優化問題
- 應用
- 基于深度學習的推薦系統:綜述和新視角
- 引言
- 基于深度學習的推薦:最先進的技術
- 基于卷積神經網絡的推薦
- 關于卷積神經網絡我們理解了什么
- 第1章概論
- 第2章多層網絡
- 2.1.4生成對抗網絡
- 2.2.1最近ConvNets演變中的關鍵架構
- 2.2.2走向ConvNet不變性
- 2.3時空卷積網絡
- 第3章了解ConvNets構建塊
- 3.2整改
- 3.3規范化
- 3.4匯集
- 第四章現狀
- 4.2打開問題
- 參考
- 機器學習超級復習筆記
- Python 遷移學習實用指南
- 零、前言
- 一、機器學習基礎
- 二、深度學習基礎
- 三、了解深度學習架構
- 四、遷移學習基礎
- 五、釋放遷移學習的力量
- 六、圖像識別與分類
- 七、文本文件分類
- 八、音頻事件識別與分類
- 九、DeepDream
- 十、自動圖像字幕生成器
- 十一、圖像著色
- 面向計算機視覺的深度學習
- 零、前言
- 一、入門
- 二、圖像分類
- 三、圖像檢索
- 四、對象檢測
- 五、語義分割
- 六、相似性學習
- 七、圖像字幕
- 八、生成模型
- 九、視頻分類
- 十、部署
- 深度學習快速參考
- 零、前言
- 一、深度學習的基礎
- 二、使用深度學習解決回歸問題
- 三、使用 TensorBoard 監控網絡訓練
- 四、使用深度學習解決二分類問題
- 五、使用 Keras 解決多分類問題
- 六、超參數優化
- 七、從頭開始訓練 CNN
- 八、將預訓練的 CNN 用于遷移學習
- 九、從頭開始訓練 RNN
- 十、使用詞嵌入從頭開始訓練 LSTM
- 十一、訓練 Seq2Seq 模型
- 十二、深度強化學習
- 十三、生成對抗網絡
- TensorFlow 2.0 快速入門指南
- 零、前言
- 第 1 部分:TensorFlow 2.00 Alpha 簡介
- 一、TensorFlow 2 簡介
- 二、Keras:TensorFlow 2 的高級 API
- 三、TensorFlow 2 和 ANN 技術
- 第 2 部分:TensorFlow 2.00 Alpha 中的監督和無監督學習
- 四、TensorFlow 2 和監督機器學習
- 五、TensorFlow 2 和無監督學習
- 第 3 部分:TensorFlow 2.00 Alpha 的神經網絡應用
- 六、使用 TensorFlow 2 識別圖像
- 七、TensorFlow 2 和神經風格遷移
- 八、TensorFlow 2 和循環神經網絡
- 九、TensorFlow 估計器和 TensorFlow HUB
- 十、從 tf1.12 轉換為 tf2
- TensorFlow 入門
- 零、前言
- 一、TensorFlow 基本概念
- 二、TensorFlow 數學運算
- 三、機器學習入門
- 四、神經網絡簡介
- 五、深度學習
- 六、TensorFlow GPU 編程和服務
- TensorFlow 卷積神經網絡實用指南
- 零、前言
- 一、TensorFlow 的設置和介紹
- 二、深度學習和卷積神經網絡
- 三、TensorFlow 中的圖像分類
- 四、目標檢測與分割
- 五、VGG,Inception,ResNet 和 MobileNets
- 六、自編碼器,變分自編碼器和生成對抗網絡
- 七、遷移學習
- 八、機器學習最佳實踐和故障排除
- 九、大規模訓練
- 十、參考文獻