
# 九、用于 TensorFlow Eager 時間序列回歸的遞歸神經網絡
大家好! 在本教程中,我們將探討如何為時間序列回歸構建循環神經網絡。 由于我的背景在電力系統中,我認為最好包括該領域相關的教程。 因此,在本教程中,我們將構建一個用于能源需求預測的 RNN。
為了預測第二天的能源需求,我們將使用 ENTSO-E 提供的每小時能耗數據。 我選擇使用來自西班牙的數據,因為我目前住在這里。 然而,相同的分析可以應用于來自任何國家的能耗數據。
教程步驟
+ ENTSO-E 能源需求數據的探索性數據分析
+ 創建訓練和測試數據集
+ 處理原始數據來創建輸入和標簽樣本
+ 為回歸創建 RNN 類
+ 從頭開始或從以前的檢查點使用梯度下降訓練模型
+ 展示測試集上的預測值和實際值之間的差異
如果你想在本教程中添加任何內容,請告訴我們。 此外,我很高興聽到你的任何改進建議。
## 導入有用的庫
```py
# 導入 TensorFlow 和 TensorFlow Eager
import tensorflow.contrib.eager as tfe
import tensorflow as tf
# 導入用于數據處理的庫
from sklearn.preprocessing import StandardScaler
from datetime import datetime as dt
import pandas as pd
import numpy as np
# 導入繪圖庫
import matplotlib.pyplot as plt
%matplotlib inline
# 開啟 Eager 模式。一旦開啟不能撤銷!只執行一次。
tfe.enable_eager_execution(device_policy=tfe.DEVICE_PLACEMENT_SILENT)
```
## 探索性數據分析
可以在文件夾datasets / load_forecasting中找到本教程中使用的數據集。 我們讀取它,來看看吧!
```py
energy_df = pd.read_csv('datasets/load_forecasting/spain_hourly_entsoe.csv')
energy_df.tail(2)
```
| | Time (CET) | Day-ahead Total Load Forecast [MW] - BZN|ES | Actual Total Load [MW] - BZN|ES |
| --- | --- | --- | --- |
| 29230 | 02.05.2018 22:00 - 02.05.2018 23:00 | 30187.0 | 30344.0 |
| 29231 | 02.05.2018 23:00 - 03.05.2018 00:00 | 27618.0 | 27598.0 |
```py
# 重命名行
energy_df.columns = ['time', 'forecasted_load', 'actual_load']
# 從 'Time (CET)' 中提取日期和時間
energy_df['date'] = energy_df['time'].apply(lambda x: dt.strptime(x.split('-')[0].strip(), '%d.%m.%Y %H:%M'))
```
如你所見,數據集附帶每個測量的時間戳,特定小時的實際能量需求,以及預測值。 對于我們的任務,我們只使用`Actual Total Load [MW]`列。
```py
printprint(('The date of the first measurement: ''The da , energy_df.loc[0, 'time'])
# The date of the first measurement: 01.01.2015 00:00 - 01.01.2015 01:00
print('The date of the last measurement: ', energy_df.loc[len(energy_df)-1, 'time'])
# The date of the last measurement: 02.05.2018 23:00 - 03.05.2018 00:00
```
該數據集包括從 2015 年 1 月 1 日到 2018 年 5 月 2 日的每小時能耗數據。最近的數據!
## 從時間序列數據創建輸入和標簽樣本
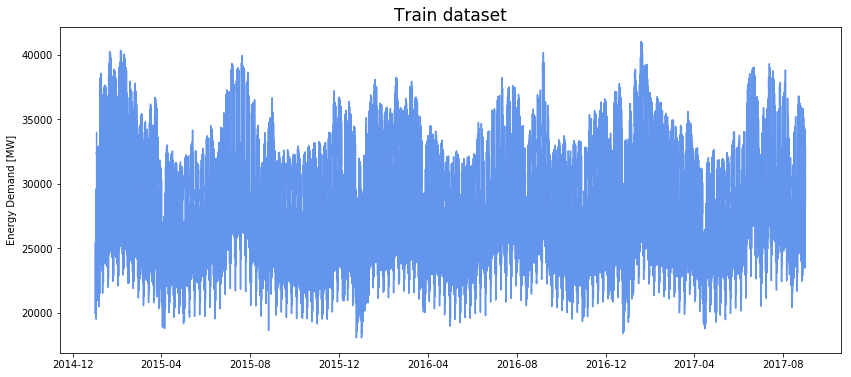
### 將數據分割為訓練/測試數據集
數據處理的第一步是從原始數據創建訓練和測試數據集。 我選擇將 80% 的數據保留在訓練集中,20% 保留在測試集中。 通過修改`train_size`變量,隨意調整此參數。
```py
# 將數據分割為訓練和測試數據集
train_size = 0.8
end_train = int(len(energy_df)*train_size/24)*24
train_energy_df = energy_df.iloc[:end_train,:]
test_energy_df = energy_df.iloc[end_train:,:]
# 繪制訓練集
plt.figure(figsize=(14,6))
plt.plot(train_energy_df['date'], train_energy_df['actual_load'], color='cornflowerblue');
plt.title('Train dataset', fontsize=17);
plt.ylabel('Energy Demand [MW]');
```
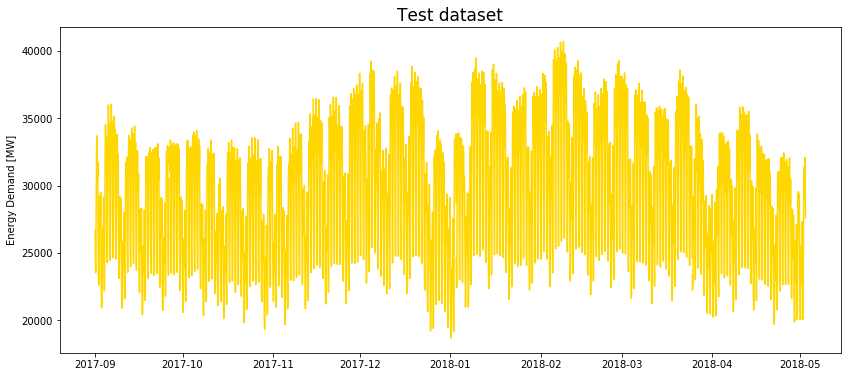
```py
# 繪制測試集
plt.figure(figsize=(14,6))
plt.plot(test_energy_df['date'], test_energy_df['actual_load'], color='gold');
plt.title('Test dataset', fontsize=17);
plt.ylabel('Energy Demand [MW]');
```
### 縮放數據集
數據被標準化后,神經網絡工作得更好,收斂速度更快。 對于此任務,我選擇使用零均值和單位方差對數據進行標準化,因為我發現這對 LSTM 更有效。 你還可以嘗試使用`MinMaxScaler`對數據進行標準化,看看是否可以獲得更好的結果。
```py
# 為缺失的度量進行差值
train_energy_df = train_energy_df.interpolate(limit_direction='both')
test_energy_df = test_energy_df.interpolate(limit_direction='both')
scaler = StandardScaler().fit(train_energy_df['actual_load'][:,None])
train_energy_df['actual_load'] = scaler.transform(train_energy_df['actual_load'][:,None])
test_energy_df['actual_load'] = scaler.transform(test_energy_df['actual_load'][:,None])
```
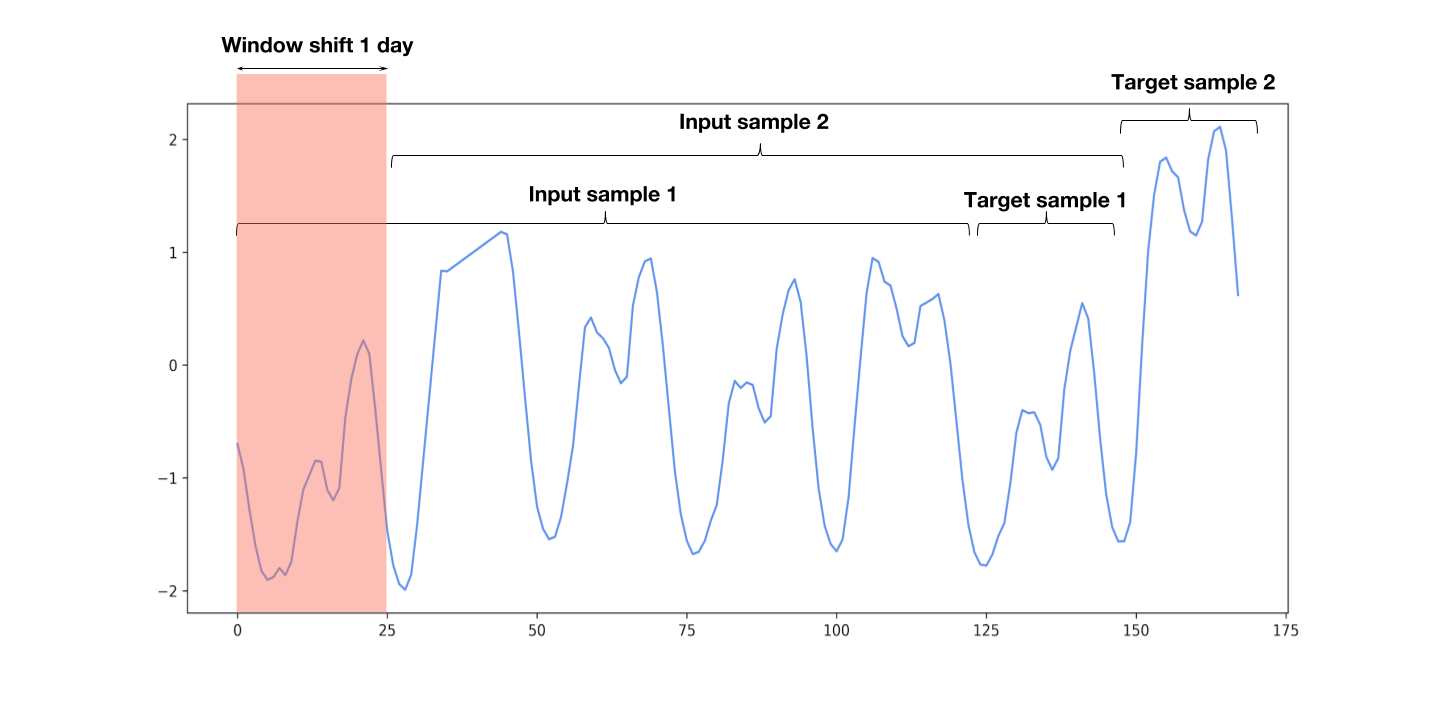
### 創建滑動窗口樣本
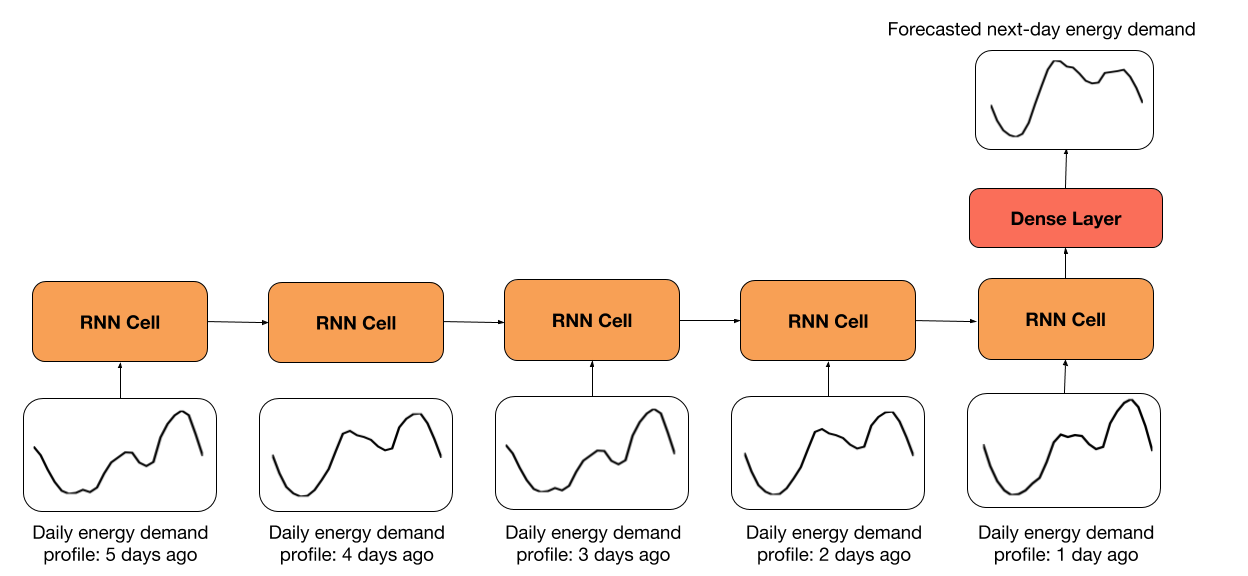
你可以在我創建的函數下面的代碼單元格中找到,從時間序列數據生成輸入和標簽樣本。 每個 RNN 單元中的輸入是一天的每小時數據。 時間步數由`look_back`變量定義,該變量指定要回顧的天數。 默認值為 5 天,這意味著 RNN 將展開 5 個步驟。
你還可以指定預測的天數,默認為一天。
輸入和標簽樣本是基于`look_back`和`predict_ahead`變量創建的,如下圖所示。
```py
def moving_window_samples(timeseries, look_back=5, predict_ahead=1):
'''
用于從時間序列創建輸入和標簽樣本的函數,延遲為一天。
Args:
timeseries: timeseries dataset.
look_back: the size of the input. Specifies how many days to look back.
predict_ahead: size of the output. Specifies how many days to predict ahead.
Returns:
input_samples: the input samples createad from the timeseries,
using a window shift of one day.
target_samples: the target corresponding to each input sample.
'''
n_strides = int((len(timeseries)- predict_ahead*24 - look_back*24 + 24)/24)
input_samples = np.zeros((n_strides, look_back*24))
target_samples = np.zeros((n_strides, predict_ahead*24))
for i in range(n_strides):
end_input = i*24 + look_back*24
input_samples[i,:] = timeseries[i*24:end_input]
target_samples[i,:] = timeseries[end_input:(end_input + predict_ahead*24)]
# 將輸入形狀修改為(樣本數,時間步長,輸入維度)
input_samples = input_samples.reshape((-1, look_back, 24))
return input_samples.astype('float32'), target_samples.astype('float32')
train_input_samples, train_target_samples = moving_window_samples(train_energy_df['actual_load'],
look_back=5, predict_ahead=1)
test_input_samples, test_target_samples = moving_window_samples(test_energy_df['actual_load'],
look_back=5, predict_ahead=1)
```
### 使用`tf.data.Dataset`創建訓練和測試數據集
通常,我們使用`tf.data.Dataset` API 將數據傳輸到張量。 我選擇了 64 的批量大小,但隨意調整它。 在訓練網絡時,我們可以使用`tfe.Iterator`函數非常輕松地遍歷這些數據集。
```py
# 隨意修改批量大小
# 通常較小的批量大小在測試集上獲得更好的結果
batch_size = 64
train_dataset = (tf.data.Dataset.from_tensor_slices(
(train_input_samples, train_target_samples)).batch(batch_size))
test_dataset = (tf.data.Dataset.from_tensor_slices(
(test_input_samples, test_target_samples)).batch(batch_size))
```
## 兼容 Eager API 的 RNN 回歸模型
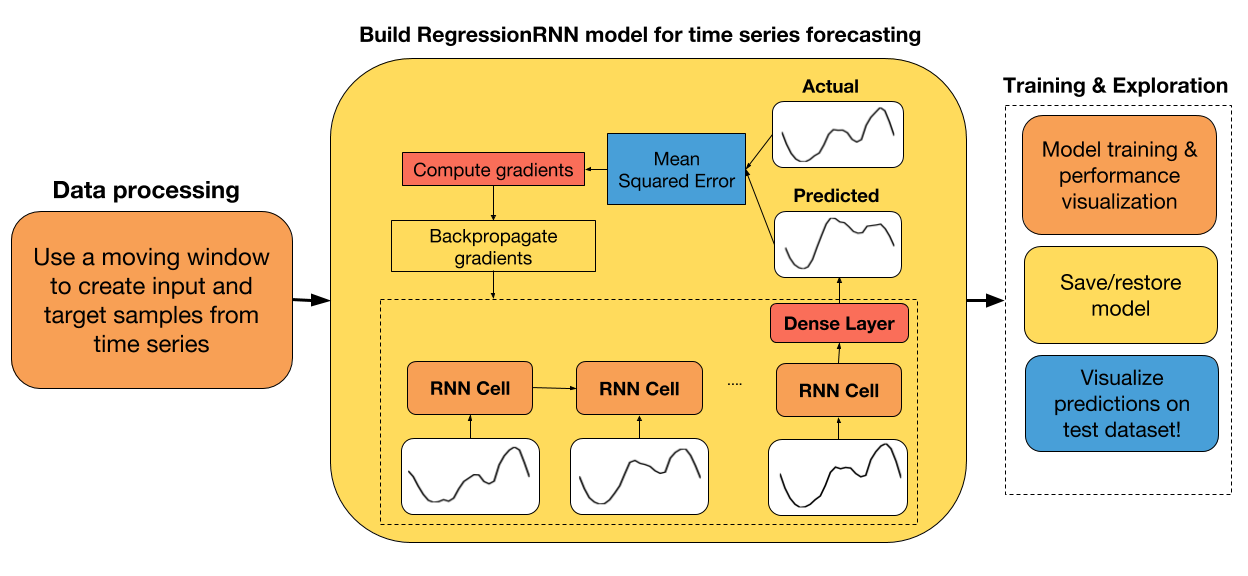
RNN 模型的類與以前的模型非常相似。 在初始化期間,我們定義了正向傳播中所需的所有層。 我們還可以指定要在其上執行計算的設備,以及我們希望恢復或保存模型變量的文件路徑。 該模型繼承自`tf.keras.Model`,以便跟蹤所有變量。
該模型的架構非常簡單。 我們只需獲取最后`look_back`天的每小時數據,然后將其傳給 RNN。 最終輸出傳給了帶有 ReLU 激活的密集層。 輸出層大小由`predict_ahead`變量定義。 在我們的例子中,輸出大小是 24 個單元,因為我們預測第二天的能源需求。
```py
class RegressionRNN(tf.keras.Model):
def __init__(self, cell_size=64, dense_size=128, predict_ahead=1,
device='cpu:0', checkpoint_directory=None):
''' 定義在正向傳播期間使用的參數化層,你要在上面運行計算的設備以及檢查點目錄。 另外,你還可以修改網絡的默認大小。
Args:
cell_size: RNN cell size.
dense_size: the size of the dense layer.
predict_ahead: the number of days you would like to predict ahead.
device: string, 'cpu:n' or 'gpu:n' (n can vary). Default, 'cpu:0'.
checkpoint_directory: the directory where you would like to
save/restore a model.
'''
super(RegressionRNN, self).__init__()
# 權重初始化函數
w_initializer = tf.contrib.layers.xavier_initializer()
# 偏置初始化函數
b_initializer = tf.zeros_initializer()
# 密集層初始化
self.dense_layer = tf.keras.layers.Dense(dense_size, activation=tf.nn.relu,
kernel_initializer=w_initializer,
bias_initializer=b_initializer)
# 預測層初始化
self.pred_layer = tf.keras.layers.Dense(predict_ahead*24, activation=None,
kernel_initializer=w_initializer,
bias_initializer=b_initializer)
# 基本的 LSTM 單元
self.rnn_cell = tf.nn.rnn_cell.BasicLSTMCell(cell_size)
# 定義設備
self.device = device
# 定義檢查點目錄
self.checkpoint_directory = checkpoint_directory
def predict(self, X):
'''
在網絡上執行正向傳播
Args:
X: 3D tensor of shape (batch_size, timesteps, input_dimension).
Returns:
preds: the final predictions of the network.
'''
# 獲取一個批量的樣本數量
num_samples = tf.shape(X)[0]
# 初始化 LSTM 單元狀態為零
state = self.rnn_cell.zero_state(num_samples, dtype=tf.float32)
# 分割輸入
unstacked_input = tf.unstack(X, axis=1)
# 遍歷每個時間步驟
for input_step in unstacked_input:
output, state = self.rnn_cell(input_step, state)
# 將最后一個單元狀態傳給密集層(ReLU 激活)
dense = self.dense_layer(output)
# 計算最終的預測
preds = self.pred_layer(dense)
return preds
def loss_fn(self, X, y):
""" 定義訓練期間使用的損失函數
"""
preds = self.predict(X)
loss = tf.losses.mean_squared_error(y, preds)
return loss
def grads_fn(self, X, y):
""" 在每個正向步驟中,
動態計算損失值對模型參數的梯度
"""
with tfe.GradientTape() as tape:
loss = self.loss_fn(X, y)
return tape.gradient(loss, self.variables)
def restore_model(self):
""" 用于恢復訓練模型的函數
"""
with tf.device(self.device):
# 運行模型一次來初始化變量
dummy_input = tf.constant(tf.zeros((1, 5, 24)))
dummy_pred = self.predict(dummy_input)
# 恢復模型變量
saver = tfe.Saver(self.variables)
saver.restore(tf.train.latest_checkpoint
(self.checkpoint_directory))
def save_model(self, global_step=0):
""" 用于保存訓練模型的函數
"""
tfe.Saver(self.variables).save(self.checkpoint_directory,
global_step=global_step)
def fit(self, training_data, eval_data, optimizer, num_epochs=500,
early_stopping_rounds=10, verbose=10, train_from_scratch=False):
""" 用于訓練模型的函數,
使用所選的優化器,執行所需數量的迭代
你可以從零開始訓練,或者加載最后訓練的模型
使用了提前停止來降低網絡的過擬合風險
Args:
training_data: the data you would like to train the model on.
Must be in the tf.data.Dataset format.
eval_data: the data you would like to evaluate the model on.
Must be in the tf.data.Dataset format.
optimizer: the optimizer used during training.
num_epochs: the maximum number of iterations you would like to
train the model.
early_stopping_rounds: stop training if the loss on the eval
dataset does not decrease after n epochs.
verbose: int. Specify how often to print the loss value of the network.
train_from_scratch: boolean. Whether to initialize variables of the
the last trained model or initialize them
randomly.
"""
if train_from_scratch==False:
self.restore_model()
# 初始化最佳損失。這個遍歷儲存評估數據集上的最低損失
best_loss = 999
# 初始化類別來更新訓練和評估平均損失
train_loss = tfe.metrics.Mean('train_loss')
eval_loss = tfe.metrics.Mean('eval_loss')
# 初始化目錄來儲存損失歷史
self.history = {}
self.history['train_loss'] = []
self.history['eval_loss'] = []
# 開始訓練
with tf.device(self.device):
for i in range(num_epochs):
# 使用梯度下降來訓練
for X, y in tfe.Iterator(training_data):
grads = self.grads_fn(X, y)
optimizer.apply_gradients(zip(grads, self.variables))
# 計算一個迭代后訓練數據上的損失
for X, y in tfe.Iterator(training_data):
loss = self.loss_fn(X, y)
train_loss(loss)
self.history['train_loss'].append(train_loss.result().numpy())
# 重置指標
train_loss.init_variables()
# 計算一個迭代后評估數據上的損失
for X, y in tfe.Iterator(eval_data):
loss = self.loss_fn(X, y)
eval_loss(loss)
self.history['eval_loss'].append(eval_loss.result().numpy())
# 重置指標
eval_loss.init_variables()
# 打印訓練和評估損失
if (i==0) | ((i+1)%verbose==0):
print('Train loss at epoch %d: ' %(i+1), self.history['train_loss'][-1])
print('Eval loss at epoch %d: ' %(i+1), self.history['eval_loss'][-1])
# 為提前停止而檢查
if self.history['eval_loss'][-1]<best_loss:
best_loss = self.history['eval_loss'][-1]
count = early_stopping_rounds
else:
count -= 1
if count==0:
break
```
## 使用梯度下降來訓練模型
```py
# 指定你打算保存/恢復訓練變量的路徑
checkpoint_directory = 'models_checkpoints/DemandRNN/'
# 如果可用,則使用 GPU
device = 'gpu:0' if tfe.num_gpus()>0 else 'cpu:0'
# 定義優化器
optimizer = tf.train.AdamOptimizer(learning_rate=1e-2)
# 實例化模型。這并不會實例化變量。
model = RegressionRNN(cell_size=16, dense_size=16, predict_ahead=1,
device=device, checkpoint_directory=checkpoint_directory)
# 訓練模型
model.fit(train_dataset, test_dataset, optimizer, num_epochs=500,
early_stopping_rounds=5, verbose=50, train_from_scratch=True)
'''
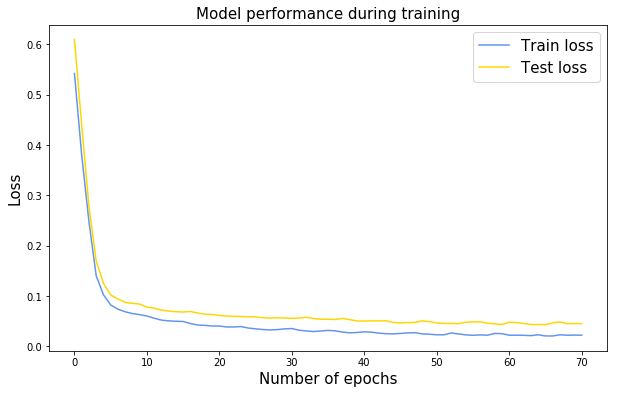
Train loss at epoch 1: 0.5420932229608297
Eval loss at epoch 1: 0.609554298222065
Train loss at epoch 50: 0.024180740118026733
Eval loss at epoch 50: 0.049175919964909554
'''
# 保存模型
model.save_model()
```
## 在訓練期間展示表現
我們可以很容易地看到在模型擬合過程中自動跟蹤的損失歷史。
```py
plt.figure(figsize=(10, 6))
plt.plot(range(len(model.history['train_loss'])), model.history['train_loss'],
color='cornflowerblue', label='Train loss');
plt.plot(range(len(model.history['eval_loss'])), model.history['eval_loss'],
color='gold', label='Test loss');
plt.title('Model performance during training', fontsize=15)
plt.xlabel('Number of epochs', fontsize=15);
plt.ylabel('Loss', fontsize=15);
plt.legend(fontsize=15);
```
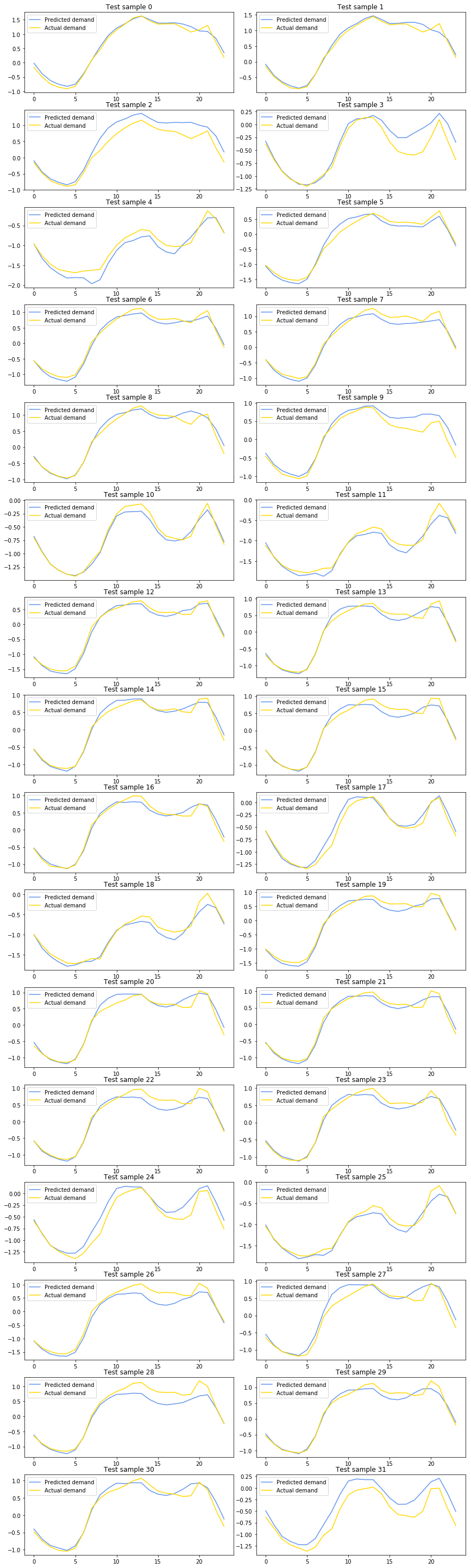
## 展示測試集上的預測
這是本教程的最后一部分。 在對網絡進行訓練后,我們可以可展示測試數據集進行的預測。
如果你已經跳過訓練,我添加了一個單元格,你可以輕松恢復已經訓練過的模型。
```py
##################################################
# 恢復之前訓練過的模型
##################################################
tf.reset_default_graph()
checkpoint_directory = 'models_checkpoints/DemandRNN/'
model = RegressionRNN(cell_size=16, dense_size=16, predict_ahead=1,
device=device, checkpoint_directory=checkpoint_directory)
model.restore_model()
#
INFO:tensorflow:Restoring parameters from models_checkpoints/DemandRNN/-0
###################################################
# 展示實際值和預測值
###################################################
with tf.device(device):
# 創建輸入和標簽樣本的迭代器
X_test, y_test = tfe.Iterator(test_dataset).next()
# 預測測試批量
preds = model.predict(X_test).numpy()
y = y_test.numpy()
# 為一般的批量樣本(32)創建子圖
f, axarr = plt.subplots(16, 2, figsize=(12, 40))
f.tight_layout()
# 繪制預測
i, j = 0, 0
for idx in range(32):
axarr[i,j].plot(range(24), preds[idx,:], label='Predicted demand',
color='cornflowerblue')
axarr[i,j].plot(range(24), y[idx,:], label='Actual demand',
color='gold')
axarr[i,j].legend()
axarr[i,j].set_title('Test sample %d' %idx)
if j==1:
i += 1
j = 0
else:
j += 1
```
- TensorFlow 1.x 深度學習秘籍
- 零、前言
- 一、TensorFlow 簡介
- 二、回歸
- 三、神經網絡:感知器
- 四、卷積神經網絡
- 五、高級卷積神經網絡
- 六、循環神經網絡
- 七、無監督學習
- 八、自編碼器
- 九、強化學習
- 十、移動計算
- 十一、生成模型和 CapsNet
- 十二、分布式 TensorFlow 和云深度學習
- 十三、AutoML 和學習如何學習(元學習)
- 十四、TensorFlow 處理單元
- 使用 TensorFlow 構建機器學習項目中文版
- 一、探索和轉換數據
- 二、聚類
- 三、線性回歸
- 四、邏輯回歸
- 五、簡單的前饋神經網絡
- 六、卷積神經網絡
- 七、循環神經網絡和 LSTM
- 八、深度神經網絡
- 九、大規模運行模型 -- GPU 和服務
- 十、庫安裝和其他提示
- TensorFlow 深度學習中文第二版
- 一、人工神經網絡
- 二、TensorFlow v1.6 的新功能是什么?
- 三、實現前饋神經網絡
- 四、CNN 實戰
- 五、使用 TensorFlow 實現自編碼器
- 六、RNN 和梯度消失或爆炸問題
- 七、TensorFlow GPU 配置
- 八、TFLearn
- 九、使用協同過濾的電影推薦
- 十、OpenAI Gym
- TensorFlow 深度學習實戰指南中文版
- 一、入門
- 二、深度神經網絡
- 三、卷積神經網絡
- 四、循環神經網絡介紹
- 五、總結
- 精通 TensorFlow 1.x
- 一、TensorFlow 101
- 二、TensorFlow 的高級庫
- 三、Keras 101
- 四、TensorFlow 中的經典機器學習
- 五、TensorFlow 和 Keras 中的神經網絡和 MLP
- 六、TensorFlow 和 Keras 中的 RNN
- 七、TensorFlow 和 Keras 中的用于時間序列數據的 RNN
- 八、TensorFlow 和 Keras 中的用于文本數據的 RNN
- 九、TensorFlow 和 Keras 中的 CNN
- 十、TensorFlow 和 Keras 中的自編碼器
- 十一、TF 服務:生產中的 TensorFlow 模型
- 十二、遷移學習和預訓練模型
- 十三、深度強化學習
- 十四、生成對抗網絡
- 十五、TensorFlow 集群的分布式模型
- 十六、移動和嵌入式平臺上的 TensorFlow 模型
- 十七、R 中的 TensorFlow 和 Keras
- 十八、調試 TensorFlow 模型
- 十九、張量處理單元
- TensorFlow 機器學習秘籍中文第二版
- 一、TensorFlow 入門
- 二、TensorFlow 的方式
- 三、線性回歸
- 四、支持向量機
- 五、最近鄰方法
- 六、神經網絡
- 七、自然語言處理
- 八、卷積神經網絡
- 九、循環神經網絡
- 十、將 TensorFlow 投入生產
- 十一、更多 TensorFlow
- 與 TensorFlow 的初次接觸
- 前言
- 1.?TensorFlow 基礎知識
- 2. TensorFlow 中的線性回歸
- 3. TensorFlow 中的聚類
- 4. TensorFlow 中的單層神經網絡
- 5. TensorFlow 中的多層神經網絡
- 6. 并行
- 后記
- TensorFlow 學習指南
- 一、基礎
- 二、線性模型
- 三、學習
- 四、分布式
- TensorFlow Rager 教程
- 一、如何使用 TensorFlow Eager 構建簡單的神經網絡
- 二、在 Eager 模式中使用指標
- 三、如何保存和恢復訓練模型
- 四、文本序列到 TFRecords
- 五、如何將原始圖片數據轉換為 TFRecords
- 六、如何使用 TensorFlow Eager 從 TFRecords 批量讀取數據
- 七、使用 TensorFlow Eager 構建用于情感識別的卷積神經網絡(CNN)
- 八、用于 TensorFlow Eager 序列分類的動態循壞神經網絡
- 九、用于 TensorFlow Eager 時間序列回歸的遞歸神經網絡
- TensorFlow 高效編程
- 圖嵌入綜述:問題,技術與應用
- 一、引言
- 三、圖嵌入的問題設定
- 四、圖嵌入技術
- 基于邊重構的優化問題
- 應用
- 基于深度學習的推薦系統:綜述和新視角
- 引言
- 基于深度學習的推薦:最先進的技術
- 基于卷積神經網絡的推薦
- 關于卷積神經網絡我們理解了什么
- 第1章概論
- 第2章多層網絡
- 2.1.4生成對抗網絡
- 2.2.1最近ConvNets演變中的關鍵架構
- 2.2.2走向ConvNet不變性
- 2.3時空卷積網絡
- 第3章了解ConvNets構建塊
- 3.2整改
- 3.3規范化
- 3.4匯集
- 第四章現狀
- 4.2打開問題
- 參考
- 機器學習超級復習筆記
- Python 遷移學習實用指南
- 零、前言
- 一、機器學習基礎
- 二、深度學習基礎
- 三、了解深度學習架構
- 四、遷移學習基礎
- 五、釋放遷移學習的力量
- 六、圖像識別與分類
- 七、文本文件分類
- 八、音頻事件識別與分類
- 九、DeepDream
- 十、自動圖像字幕生成器
- 十一、圖像著色
- 面向計算機視覺的深度學習
- 零、前言
- 一、入門
- 二、圖像分類
- 三、圖像檢索
- 四、對象檢測
- 五、語義分割
- 六、相似性學習
- 七、圖像字幕
- 八、生成模型
- 九、視頻分類
- 十、部署
- 深度學習快速參考
- 零、前言
- 一、深度學習的基礎
- 二、使用深度學習解決回歸問題
- 三、使用 TensorBoard 監控網絡訓練
- 四、使用深度學習解決二分類問題
- 五、使用 Keras 解決多分類問題
- 六、超參數優化
- 七、從頭開始訓練 CNN
- 八、將預訓練的 CNN 用于遷移學習
- 九、從頭開始訓練 RNN
- 十、使用詞嵌入從頭開始訓練 LSTM
- 十一、訓練 Seq2Seq 模型
- 十二、深度強化學習
- 十三、生成對抗網絡
- TensorFlow 2.0 快速入門指南
- 零、前言
- 第 1 部分:TensorFlow 2.00 Alpha 簡介
- 一、TensorFlow 2 簡介
- 二、Keras:TensorFlow 2 的高級 API
- 三、TensorFlow 2 和 ANN 技術
- 第 2 部分:TensorFlow 2.00 Alpha 中的監督和無監督學習
- 四、TensorFlow 2 和監督機器學習
- 五、TensorFlow 2 和無監督學習
- 第 3 部分:TensorFlow 2.00 Alpha 的神經網絡應用
- 六、使用 TensorFlow 2 識別圖像
- 七、TensorFlow 2 和神經風格遷移
- 八、TensorFlow 2 和循環神經網絡
- 九、TensorFlow 估計器和 TensorFlow HUB
- 十、從 tf1.12 轉換為 tf2
- TensorFlow 入門
- 零、前言
- 一、TensorFlow 基本概念
- 二、TensorFlow 數學運算
- 三、機器學習入門
- 四、神經網絡簡介
- 五、深度學習
- 六、TensorFlow GPU 編程和服務
- TensorFlow 卷積神經網絡實用指南
- 零、前言
- 一、TensorFlow 的設置和介紹
- 二、深度學習和卷積神經網絡
- 三、TensorFlow 中的圖像分類
- 四、目標檢測與分割
- 五、VGG,Inception,ResNet 和 MobileNets
- 六、自編碼器,變分自編碼器和生成對抗網絡
- 七、遷移學習
- 八、機器學習最佳實踐和故障排除
- 九、大規模訓練
- 十、參考文獻