
# 0874. 模擬行走機器人
## 題目地址(874. 模擬行走機器人)
<https://leetcode-cn.com/problems/walking-robot-simulation/submissions/>
## 題目描述
```
<pre class="calibre18">```
機器人在一個無限大小的網格上行走,從點 (0, 0) 處開始出發,面向北方。該機器人可以接收以下三種類型的命令:
-2:向左轉 90 度
-1:向右轉 90 度
1 <= x <= 9:向前移動 x 個單位長度
在網格上有一些格子被視為障礙物。
第 i 個障礙物位于網格點 (obstacles[i][0], obstacles[i][1])
如果機器人試圖走到障礙物上方,那么它將停留在障礙物的前一個網格方塊上,但仍然可以繼續該路線的其余部分。
返回從原點到機器人的最大歐式距離的平方。
示例 1:
輸入: commands = [4,-1,3], obstacles = []
輸出: 25
解釋: 機器人將會到達 (3, 4)
示例 2:
輸入: commands = [4,-1,4,-2,4], obstacles = [[2,4]]
輸出: 65
解釋: 機器人在左轉走到 (1, 8) 之前將被困在 (1, 4) 處
提示:
0 <= commands.length <= 10000
0 <= obstacles.length <= 10000
-30000 <= obstacle[i][0] <= 30000
-30000 <= obstacle[i][1] <= 30000
答案保證小于 2 ^ 31
```
```
## 前置知識
- hashtable
## 公司
- 暫無
## 思路
這道題之所以是簡單難度,是因為其沒有什么技巧。你只需要看懂題目描述,然后把題目描述轉化為代碼即可。
唯一需要注意的是查找障礙物的時候如果你采用的是`線形查找`會很慢,很可能會超時。
> 我實際測試了一下,確實會超時
- 一種方式是使用排序,然后二分查找,如果采用基于比較的排序算法,那么這種算法的瓶頸在于排序本身,也就是O(NlogN)O(NlogN)O(NlogN)。
- 另一種方式是使用集合,將 obstacles 放入集合,然后需要的時候進行查詢,查詢的時候的時間復雜度為O(1)O(1)O(1)。
這里我們采用第二種方式。
接下來我們來“翻譯”一下題目。
- 由于機器人只能往前走。因此機器人往東西南北哪個方向走取決于它的`朝向`。
- 我們使用枚舉來表示當前機器人的`朝向`。
- 題目只有兩種方式改變`朝向`,一種是左轉(-2),另一種是右轉(-1)。
- 題目要求的是機器人在`運動過程中距離原點的最大值`,而不是最終位置距離原點的距離。
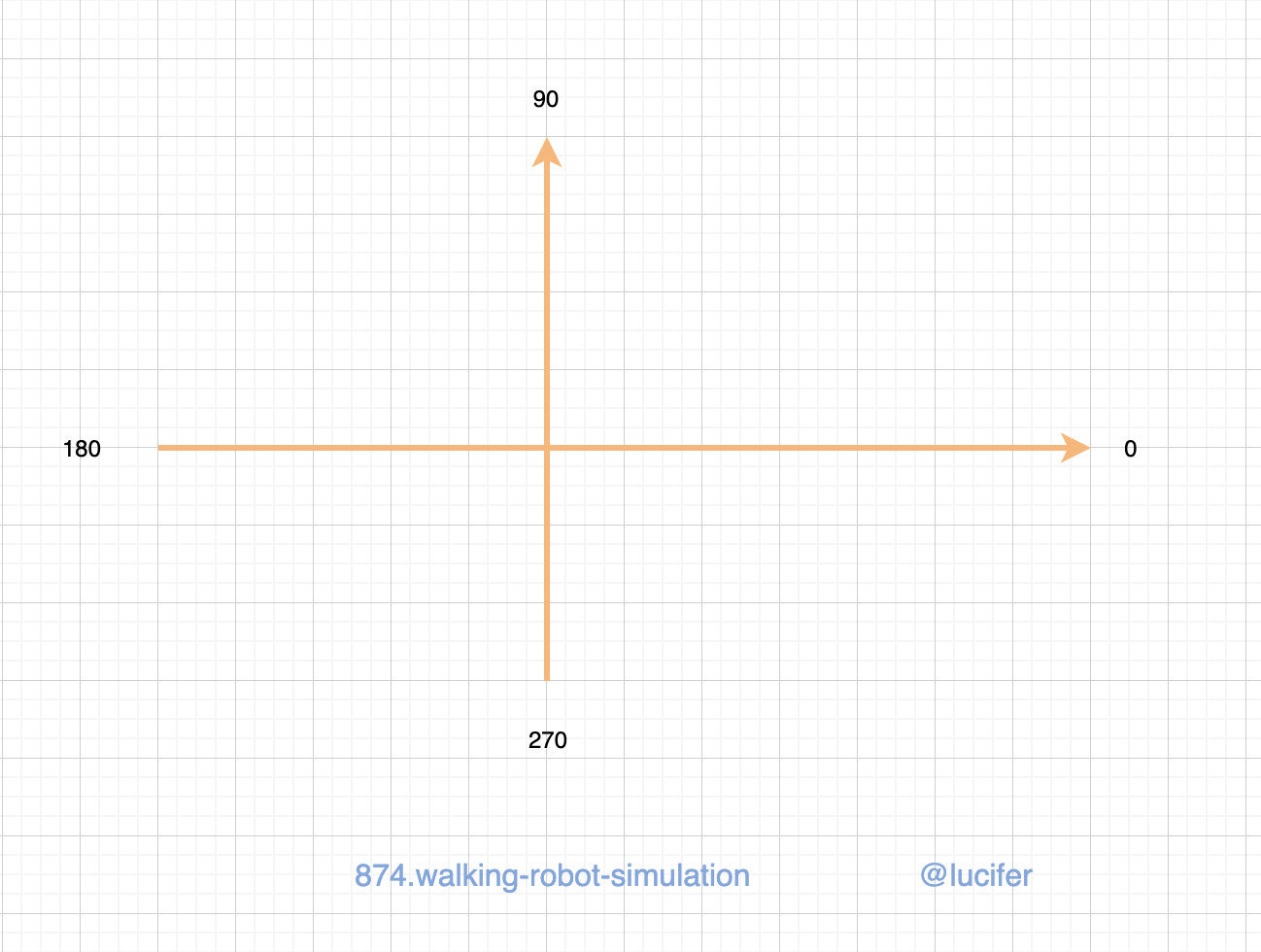
為了代碼書寫簡單,我建立了一個直角坐標系。用`機器人的朝向和 x 軸正方向的夾角度數`來作為枚舉值,并且這個度數是 `0 <= deg < 360`。我們不難知道,其實這個取值就是`0`, `90`,`180`,`270` 四個值。那么當 0 度的時候,我們只需要不斷地 x+1,90 度的時候我們不斷地 y + 1 等等。
## 關鍵點解析
- 理解題意,這道題容易理解錯題意,求解為`最終位置距離原點的距離`
- 建立坐標系
- 空間換時間
## 代碼
代碼支持: Python3
Python3 Code:
```
<pre class="calibre18">```
<span class="hljs-class"><span class="hljs-keyword">class</span> <span class="hljs-title">Solution</span>:</span>
<span class="hljs-function"><span class="hljs-keyword">def</span> <span class="hljs-title">robotSim</span><span class="hljs-params">(self, commands: List[int], obstacles: List[List[int]])</span> -> int:</span>
pos = [<span class="hljs-params">0</span>, <span class="hljs-params">0</span>]
deg = <span class="hljs-params">90</span>
ans = <span class="hljs-params">0</span>
obstaclesSet = set(map(tuple, obstacles))
<span class="hljs-keyword">for</span> command <span class="hljs-keyword">in</span> commands:
<span class="hljs-keyword">if</span> command == <span class="hljs-params">-1</span>:
deg = (deg + <span class="hljs-params">270</span>) % <span class="hljs-params">360</span>
<span class="hljs-keyword">elif</span> command == <span class="hljs-params">-2</span>:
deg = (deg + <span class="hljs-params">90</span>) % <span class="hljs-params">360</span>
<span class="hljs-keyword">else</span>:
<span class="hljs-keyword">if</span> deg == <span class="hljs-params">0</span>:
i = <span class="hljs-params">0</span>
<span class="hljs-keyword">while</span> i < command <span class="hljs-keyword">and</span> <span class="hljs-keyword">not</span> (pos[<span class="hljs-params">0</span>] + <span class="hljs-params">1</span>, pos[<span class="hljs-params">1</span>]) <span class="hljs-keyword">in</span> obstaclesSet:
pos[<span class="hljs-params">0</span>] += <span class="hljs-params">1</span>
i += <span class="hljs-params">1</span>
<span class="hljs-keyword">if</span> deg == <span class="hljs-params">90</span>:
i = <span class="hljs-params">0</span>
<span class="hljs-keyword">while</span> i < command <span class="hljs-keyword">and</span> <span class="hljs-keyword">not</span> (pos[<span class="hljs-params">0</span>], pos[<span class="hljs-params">1</span>] + <span class="hljs-params">1</span>) <span class="hljs-keyword">in</span> obstaclesSet:
pos[<span class="hljs-params">1</span>] += <span class="hljs-params">1</span>
i += <span class="hljs-params">1</span>
<span class="hljs-keyword">if</span> deg == <span class="hljs-params">180</span>:
i = <span class="hljs-params">0</span>
<span class="hljs-keyword">while</span> i < command <span class="hljs-keyword">and</span> <span class="hljs-keyword">not</span> (pos[<span class="hljs-params">0</span>] - <span class="hljs-params">1</span>, pos[<span class="hljs-params">1</span>]) <span class="hljs-keyword">in</span> obstaclesSet:
pos[<span class="hljs-params">0</span>] -= <span class="hljs-params">1</span>
i += <span class="hljs-params">1</span>
<span class="hljs-keyword">if</span> deg == <span class="hljs-params">270</span>:
i = <span class="hljs-params">0</span>
<span class="hljs-keyword">while</span> i < command <span class="hljs-keyword">and</span> <span class="hljs-keyword">not</span> (pos[<span class="hljs-params">0</span>], pos[<span class="hljs-params">1</span>] - <span class="hljs-params">1</span>) <span class="hljs-keyword">in</span> obstaclesSet:
pos[<span class="hljs-params">1</span>] -= <span class="hljs-params">1</span>
i += <span class="hljs-params">1</span>
ans = max(ans, pos[<span class="hljs-params">0</span>] ** <span class="hljs-params">2</span> + pos[<span class="hljs-params">1</span>] ** <span class="hljs-params">2</span>)
<span class="hljs-keyword">return</span> ans
```
```
**復雜度分析**
- 時間復雜度:O(N?M)O(N \* M)O(N?M), 其中 N 為 commands 的長度, M 為 commands 數組的平均值。
- 空間復雜度:O(obstacles)O(obstacles)O(obstacles)
更多題解可以訪問我的LeetCode題解倉庫:<https://github.com/azl397985856/leetcode> 。 目前已經37K star啦。
關注公眾號力扣加加,努力用清晰直白的語言還原解題思路,并且有大量圖解,手把手教你識別套路,高效刷題。

- Introduction
- 第一章 - 算法專題
- 數據結構
- 基礎算法
- 二叉樹的遍歷
- 動態規劃
- 哈夫曼編碼和游程編碼
- 布隆過濾器
- 字符串問題
- 前綴樹專題
- 《貪婪策略》專題
- 《深度優先遍歷》專題
- 滑動窗口(思路 + 模板)
- 位運算
- 設計題
- 小島問題
- 最大公約數
- 并查集
- 前綴和
- 平衡二叉樹專題
- 第二章 - 91 天學算法
- 第一期講義-二分法
- 第一期講義-雙指針
- 第二期
- 第三章 - 精選題解
- 《日程安排》專題
- 《構造二叉樹》專題
- 字典序列刪除
- 百度的算法面試題 * 祖瑪游戲
- 西法的刷題秘籍】一次搞定前綴和
- 字節跳動的算法面試題是什么難度?
- 字節跳動的算法面試題是什么難度?(第二彈)
- 《我是你的媽媽呀》 * 第一期
- 一文帶你看懂二叉樹的序列化
- 穿上衣服我就不認識你了?來聊聊最長上升子序列
- 你的衣服我扒了 * 《最長公共子序列》
- 一文看懂《最大子序列和問題》
- 第四章 - 高頻考題(簡單)
- 面試題 17.12. BiNode
- 0001. 兩數之和
- 0020. 有效的括號
- 0021. 合并兩個有序鏈表
- 0026. 刪除排序數組中的重復項
- 0053. 最大子序和
- 0088. 合并兩個有序數組
- 0101. 對稱二叉樹
- 0104. 二叉樹的最大深度
- 0108. 將有序數組轉換為二叉搜索樹
- 0121. 買賣股票的最佳時機
- 0122. 買賣股票的最佳時機 II
- 0125. 驗證回文串
- 0136. 只出現一次的數字
- 0155. 最小棧
- 0167. 兩數之和 II * 輸入有序數組
- 0169. 多數元素
- 0172. 階乘后的零
- 0190. 顛倒二進制位
- 0191. 位1的個數
- 0198. 打家劫舍
- 0203. 移除鏈表元素
- 0206. 反轉鏈表
- 0219. 存在重復元素 II
- 0226. 翻轉二叉樹
- 0232. 用棧實現隊列
- 0263. 丑數
- 0283. 移動零
- 0342. 4的冪
- 0349. 兩個數組的交集
- 0371. 兩整數之和
- 0437. 路徑總和 III
- 0455. 分發餅干
- 0575. 分糖果
- 0874. 模擬行走機器人
- 1260. 二維網格遷移
- 1332. 刪除回文子序列
- 第五章 - 高頻考題(中等)
- 0002. 兩數相加
- 0003. 無重復字符的最長子串
- 0005. 最長回文子串
- 0011. 盛最多水的容器
- 0015. 三數之和
- 0017. 電話號碼的字母組合
- 0019. 刪除鏈表的倒數第N個節點
- 0022. 括號生成
- 0024. 兩兩交換鏈表中的節點
- 0029. 兩數相除
- 0031. 下一個排列
- 0033. 搜索旋轉排序數組
- 0039. 組合總和
- 0040. 組合總和 II
- 0046. 全排列
- 0047. 全排列 II
- 0048. 旋轉圖像
- 0049. 字母異位詞分組
- 0050. Pow(x, n)
- 0055. 跳躍游戲
- 0056. 合并區間
- 0060. 第k個排列
- 0062. 不同路徑
- 0073. 矩陣置零
- 0075. 顏色分類
- 0078. 子集
- 0079. 單詞搜索
- 0080. 刪除排序數組中的重復項 II
- 0086. 分隔鏈表
- 0090. 子集 II
- 0091. 解碼方法
- 0092. 反轉鏈表 II
- 0094. 二叉樹的中序遍歷
- 0095. 不同的二叉搜索樹 II
- 0096. 不同的二叉搜索樹
- 0098. 驗證二叉搜索樹
- 0102. 二叉樹的層序遍歷
- 0103. 二叉樹的鋸齒形層次遍歷
- 105. 從前序與中序遍歷序列構造二叉樹
- 0113. 路徑總和 II
- 0129. 求根到葉子節點數字之和
- 0130. 被圍繞的區域
- 0131. 分割回文串
- 0139. 單詞拆分
- 0144. 二叉樹的前序遍歷
- 0150. 逆波蘭表達式求值
- 0152. 乘積最大子數組
- 0199. 二叉樹的右視圖
- 0200. 島嶼數量
- 0201. 數字范圍按位與
- 0208. 實現 Trie (前綴樹)
- 0209. 長度最小的子數組
- 0211. 添加與搜索單詞 * 數據結構設計
- 0215. 數組中的第K個最大元素
- 0221. 最大正方形
- 0229. 求眾數 II
- 0230. 二叉搜索樹中第K小的元素
- 0236. 二叉樹的最近公共祖先
- 0238. 除自身以外數組的乘積
- 0240. 搜索二維矩陣 II
- 0279. 完全平方數
- 0309. 最佳買賣股票時機含冷凍期
- 0322. 零錢兌換
- 0328. 奇偶鏈表
- 0334. 遞增的三元子序列
- 0337. 打家劫舍 III
- 0343. 整數拆分
- 0365. 水壺問題
- 0378. 有序矩陣中第K小的元素
- 0380. 常數時間插入、刪除和獲取隨機元素
- 0416. 分割等和子集
- 0445. 兩數相加 II
- 0454. 四數相加 II
- 0494. 目標和
- 0516. 最長回文子序列
- 0518. 零錢兌換 II
- 0547. 朋友圈
- 0560. 和為K的子數組
- 0609. 在系統中查找重復文件
- 0611. 有效三角形的個數
- 0718. 最長重復子數組
- 0754. 到達終點數字
- 0785. 判斷二分圖
- 0820. 單詞的壓縮編碼
- 0875. 愛吃香蕉的珂珂
- 0877. 石子游戲
- 0886. 可能的二分法
- 0900. RLE 迭代器
- 0912. 排序數組
- 0935. 騎士撥號器
- 1011. 在 D 天內送達包裹的能力
- 1014. 最佳觀光組合
- 1015. 可被 K 整除的最小整數
- 1019. 鏈表中的下一個更大節點
- 1020. 飛地的數量
- 1023. 駝峰式匹配
- 1031. 兩個非重疊子數組的最大和
- 1104. 二叉樹尋路
- 1131.絕對值表達式的最大值
- 1186. 刪除一次得到子數組最大和
- 1218. 最長定差子序列
- 1227. 飛機座位分配概率
- 1261. 在受污染的二叉樹中查找元素
- 1262. 可被三整除的最大和
- 1297. 子串的最大出現次數
- 1310. 子數組異或查詢
- 1334. 閾值距離內鄰居最少的城市
- 1371.每個元音包含偶數次的最長子字符串
- 第六章 - 高頻考題(困難)
- 0004. 尋找兩個正序數組的中位數
- 0023. 合并K個升序鏈表
- 0025. K 個一組翻轉鏈表
- 0030. 串聯所有單詞的子串
- 0032. 最長有效括號
- 0042. 接雨水
- 0052. N皇后 II
- 0084. 柱狀圖中最大的矩形
- 0085. 最大矩形
- 0124. 二叉樹中的最大路徑和
- 0128. 最長連續序列
- 0145. 二叉樹的后序遍歷
- 0212. 單詞搜索 II
- 0239. 滑動窗口最大值
- 0295. 數據流的中位數
- 0301. 刪除無效的括號
- 0312. 戳氣球
- 0335. 路徑交叉
- 0460. LFU緩存
- 0472. 連接詞
- 0488. 祖瑪游戲
- 0493. 翻轉對
- 0887. 雞蛋掉落
- 0895. 最大頻率棧
- 1032. 字符流
- 1168. 水資源分配優化
- 1449. 數位成本和為目標值的最大數字
- 后序